右腕のリカバリ
前回、制作した右腕が動かなかったため、以下の改良を行って動かしてみたいと思います。
- ワイヤーをステンレスφ0.6から釣り糸200ポンドに変更
- マイクロサーボモータから通常のサーボモータへ変更

まずは解体(スクラップ)
まずは、マイクロサーボに取り付け済のワイヤーを外して、マイクロサーボもベットから取り外します。

続いて、手首を外して指先を外してワイヤーを取り除きます。(薬指のみ外れず結局、爪部分を取り外しました。)
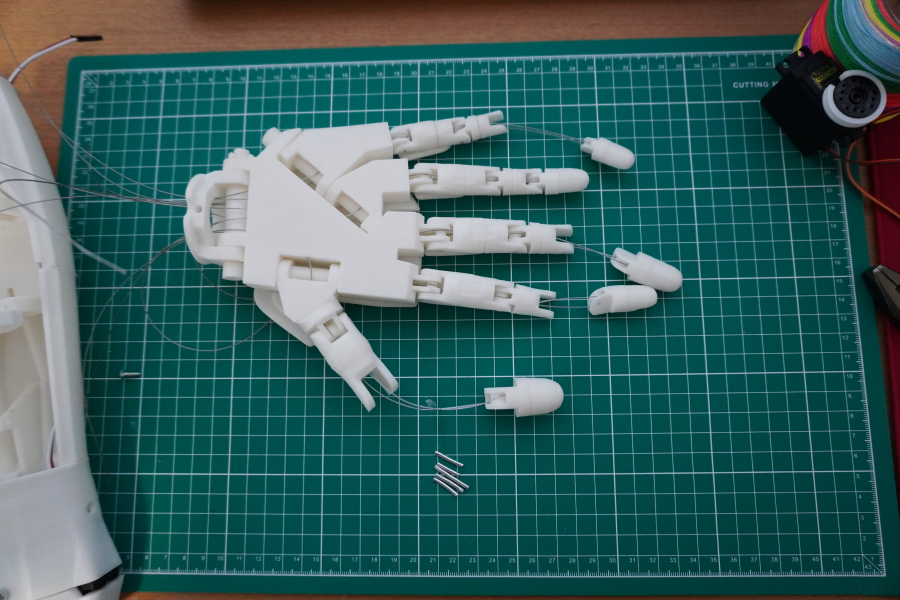
指先をペンチで外して、ワイヤーをすべて取り除きます。

リカバリ
解体が終わったので、リカバリを開始したいと思います。
まずは、通常サーボモータ(MG995互換)付属の円盤部品に3Dプリンタで印刷したプーリーを取り付けます。小ねじ(M2x5mm)を取り付けます。もし、ネジが貫通してさらにはみ出している場合は、ヤスリ等ではみ出した部分をトリム(削る)必要があります。
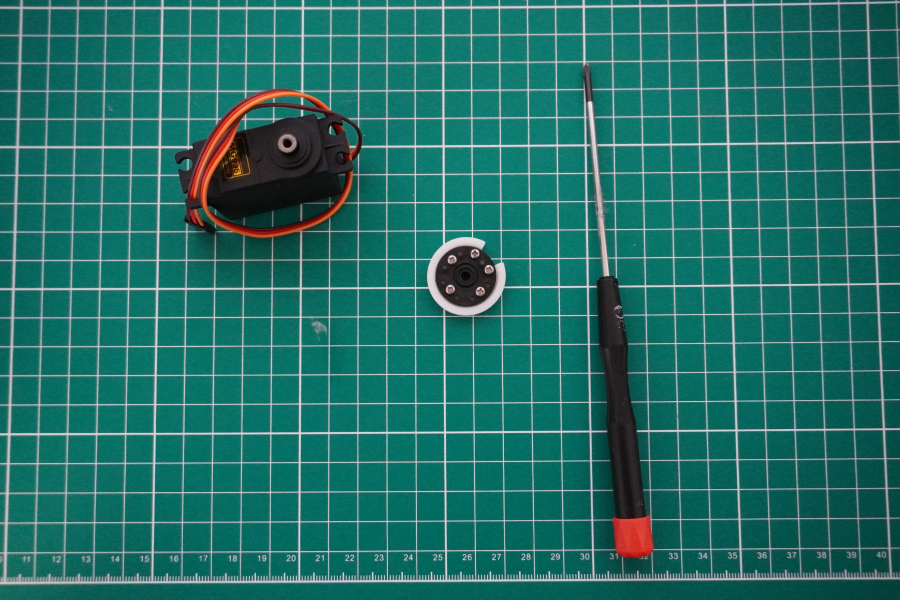
プーリーの釣り糸を通す穴を1.5mmのドリルで拡張します。(写真みにくいですが…)

サーボモータに作ったプーリーを取り付けて、ベットへ取り付ける部品も取り付けます。(最終的には、金色の部品は取り外します)

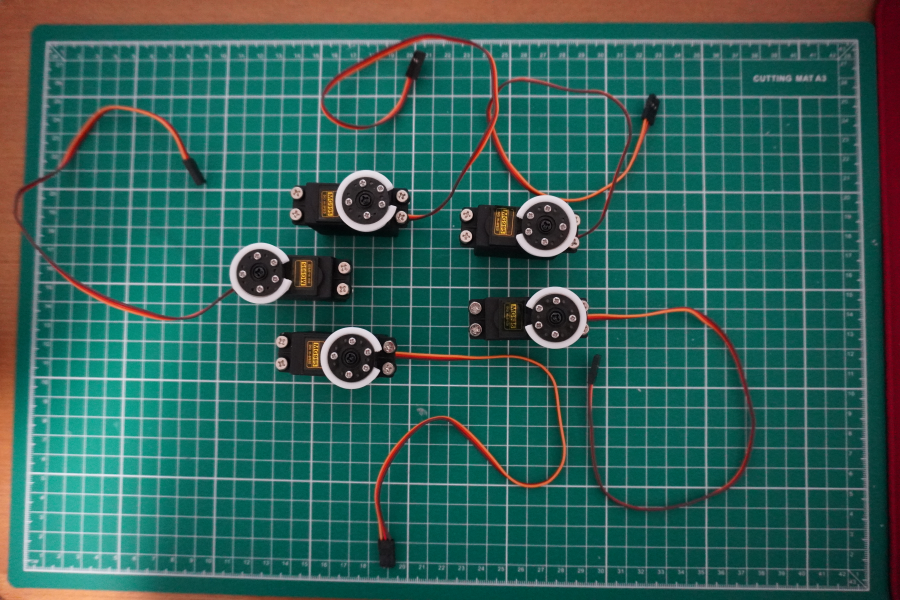
同じ要領で5つのサーボモータを作ります。
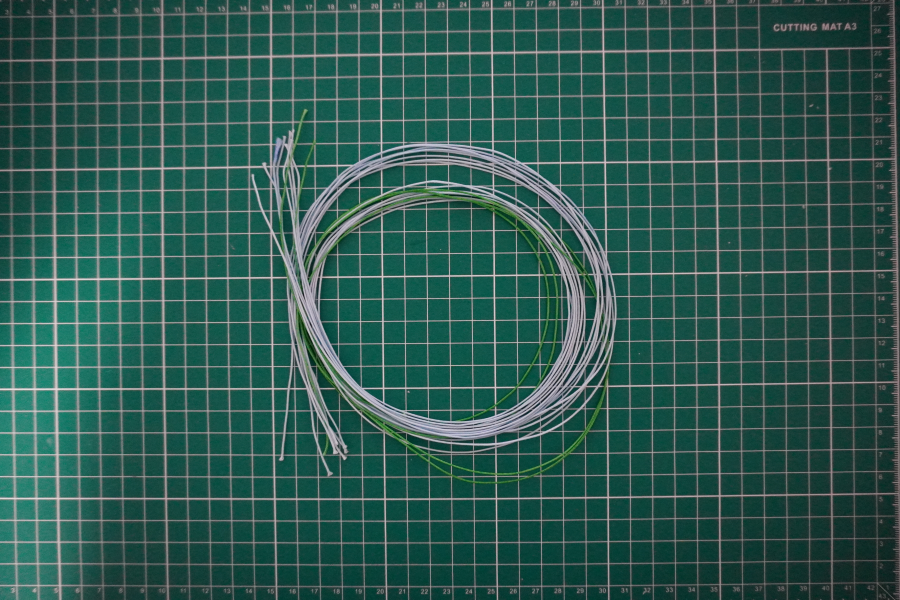
釣り糸を 75cm x 10 用意します。
釣り糸をピンセットを使いながら穴に通していきます。(かなり苦戦しました(笑))

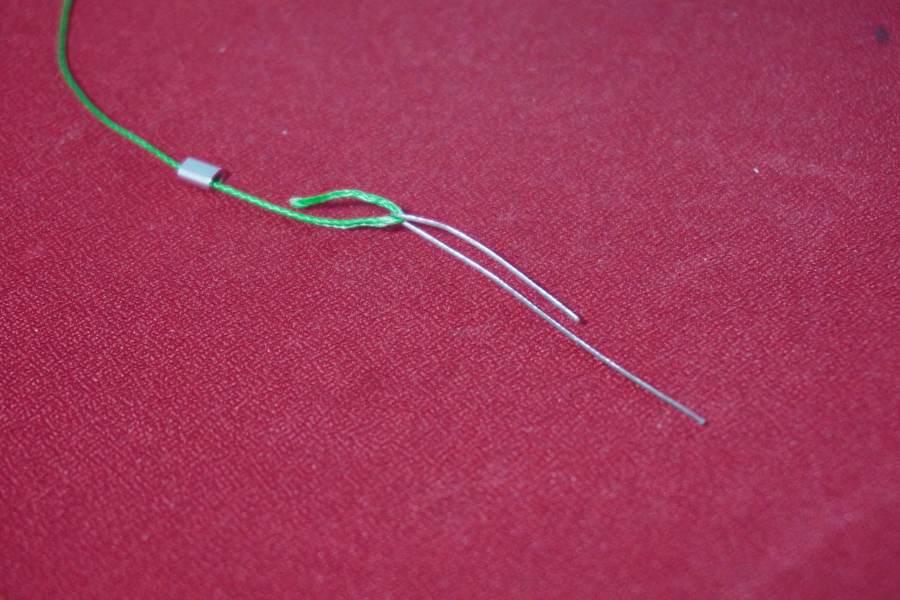
プーリーにも釣り糸をセッティング、ここも相当苦労しました。私は、画像のような糸通しを使って狭い穴には釣り糸を通しました。

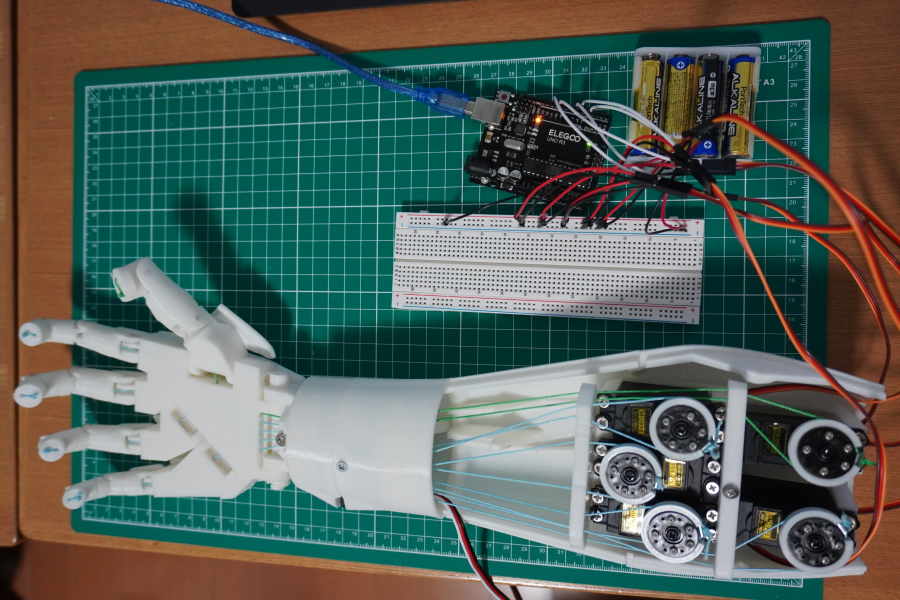
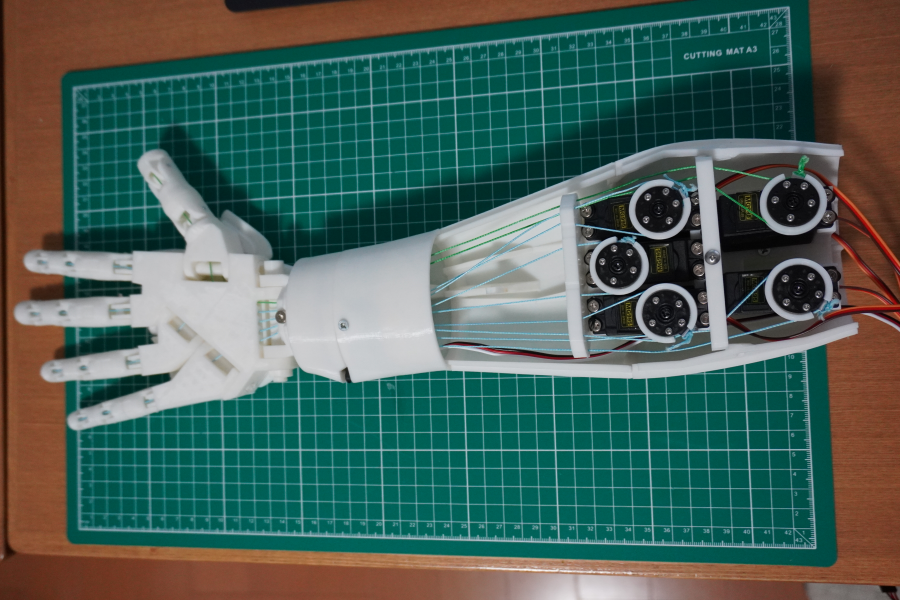
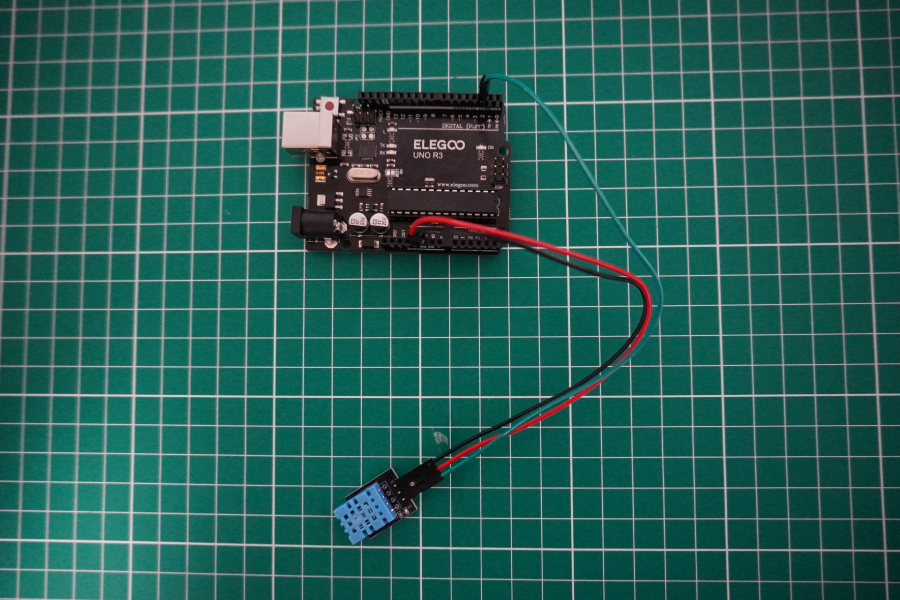
釣り糸のセッティングが終わったので実際に「Arduino UNO R3」と各モータを繋ぎます。その後微調整(キャリブレーション)を行って動かす準備が整いました。初期位置は、サーボモータを90度に設定した状態にします。
動かしてみる
実際に動かしてみました。
単純な動作ですが、前回と比べてかなり改善されています。プログラムをアレンジすれば色々な動きが実現できそうです。
一旦、動くことが確認できたので解体時に損傷した部品などを3Dプリンタで再印刷して、右手を完成させたいと思います。
なぜ、再印刷しているかといいますと…こちらの記事をご確認ください。

今後、指先の動作を色々と試してみたいのと、10分の1スケールのものをInMoovを参考にしたオリジナルハンドで試してみたいと思います。
以上

コメント
Hello, I’m from Ecuador, your work is incredible, I’m studying biomedicine, I’m in my 3rd semester and I wanted to know if you have the files uploaded to any platform so I can download them and do it here?
gmontalvoc1@gmail.com
Are you referring to the print data file for the 3D printer?
This uses an STL file from the InMoov project. Data is obtained from Gaël Langevin’s blog.
https://inmoov.fr/