
脚については、色々と動作実験を繰り返してきました。ワイヤーでの動作実験、ベルトでの動作実験を経て、やはりシッカリと動くには、高トルクのサーボモータが必要なのと、ワイヤーやベルトは、相当に協力でないと空回りや、動作不良に陥ってしまうことが分かりました。
そこで今回は、マイクロサーボではなく、通常サーボ(MG996R)を使って脚を作ってみることにしました。各関節の動作機構は、ギアを使っています。
サーボモータは、基本的に180度までしか回転しないので、DCモーターのようにギア比でトルクの変換による高出力を得ることができません。そのためギア比のメリットはそれほどありませんが、空回りなどの問題はなくなりました。
太ももの設計と組み立て
まずは、太もも部分を設計して組み立てます。


サーボモーターは、TowerPro の MG996R を使いました。
TowerProの純正品を購入する場合には、秋月電子通商で購入するか、Amazonの場合は「日本の中小企業」(以下のロゴ)の出展品を選ぶと購入できます。

サーボホーン
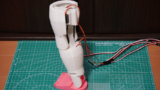
MG996Rに付属のサーボホーンは、サイズが大きく、それに合わせると足のサイズも肥大化してしまうので、3Dプリンタを使って、歯車と一体型の自前のサーボホーンを作りました。
MG996Rだと、直径5.8mmの穴にギザを25個作成します。
まずは、スケッチで1つだけのギザを描画します。
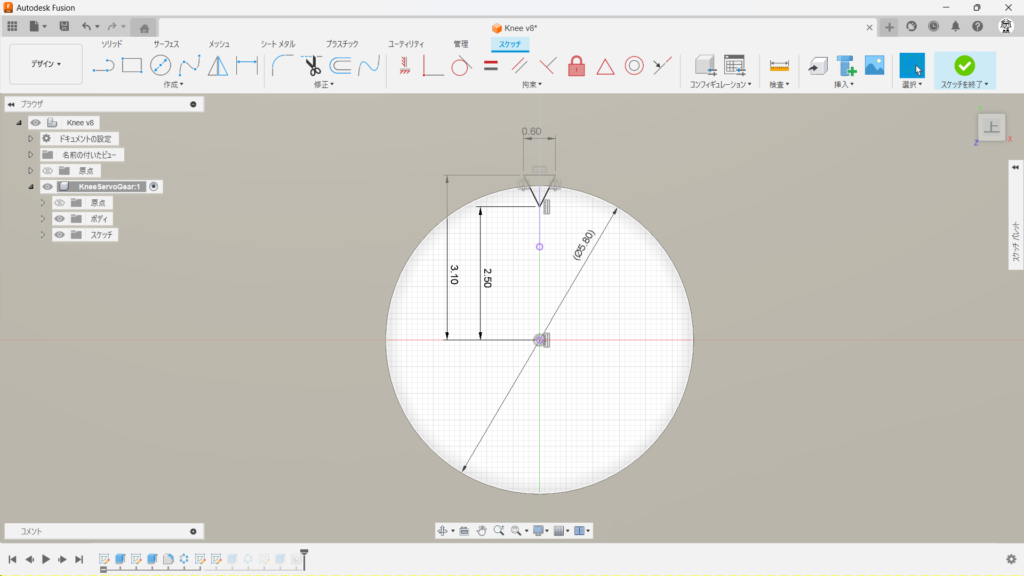
内側に3.6mmほど押し出して、円形パターンで25個のギザを作ります。
少し固めのサイズになりますが、サーボモーター側は、メタルギアなので、クランプなどを使って押し込めば、問題なくはめ込むことが出来ました。
膝の設計と組み立て
太ももと膝は、はめ込んでねじ止めできるように設計しました。
また、膝したのアームは、深く曲げても部品通しが干渉しないように切れ込みを作りました。

太ももと膝の連結
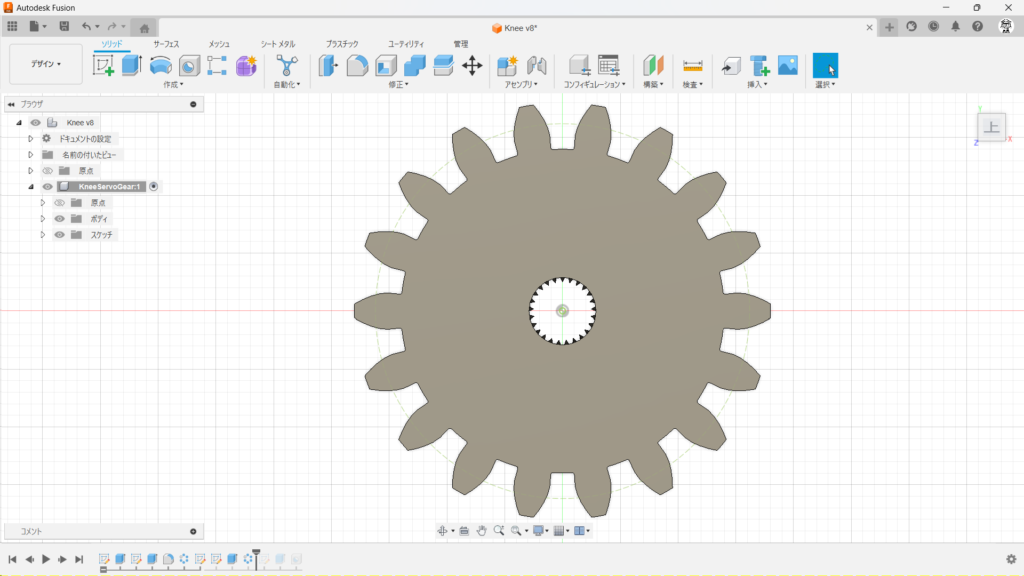
太ももと膝を繋ぎます。
それぞれ別々に制作しましたが、連結部分をはめ込めるようにしたため、はめ込んでねじ止めすることで連結できます。
下の写真は、太ももと膝を連結したものです。

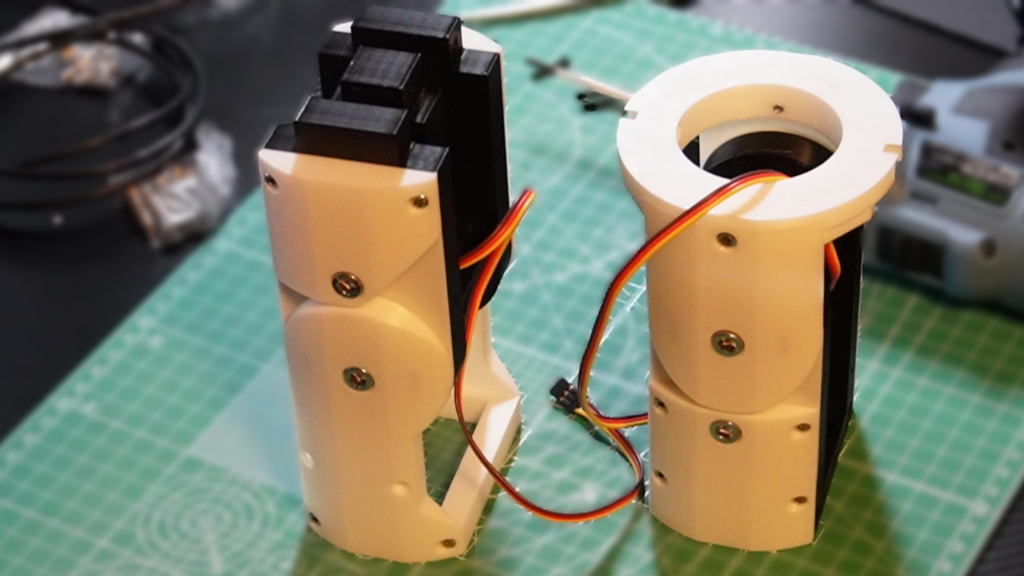
足首の設計と組み立て
足首を設計して組み立てます。
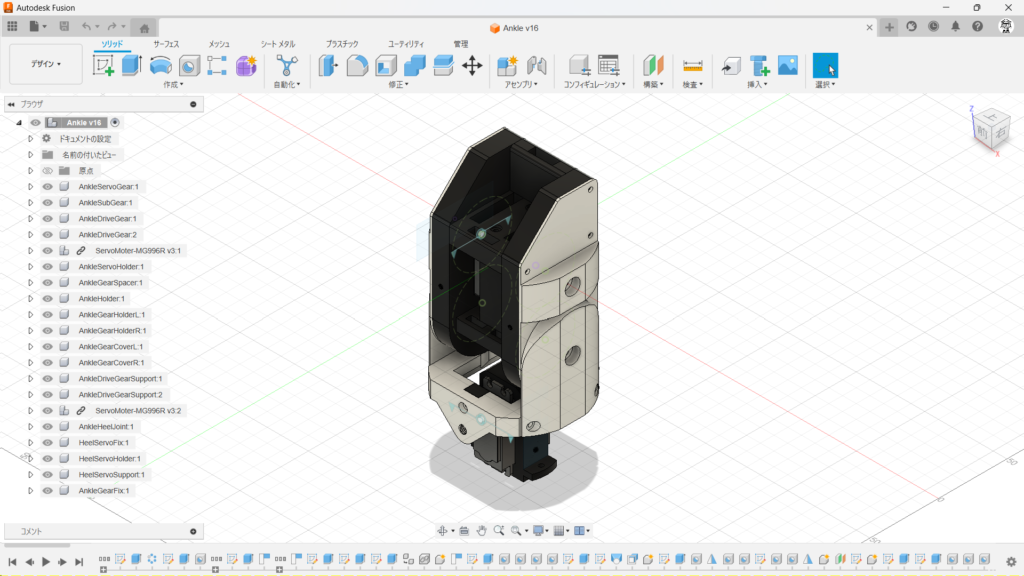
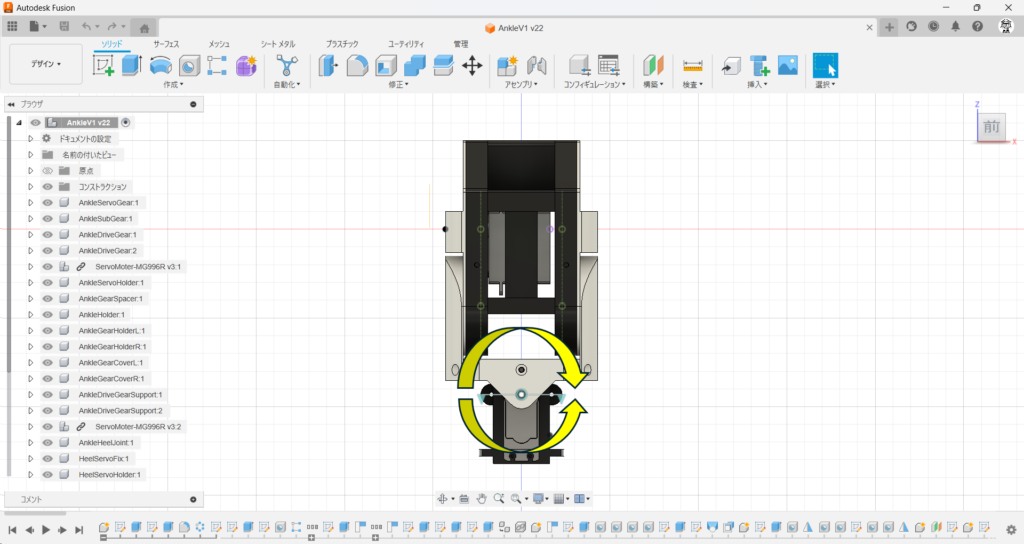
足首は、2か所駆動します。
1か所目は、足首を曲げる動作です。
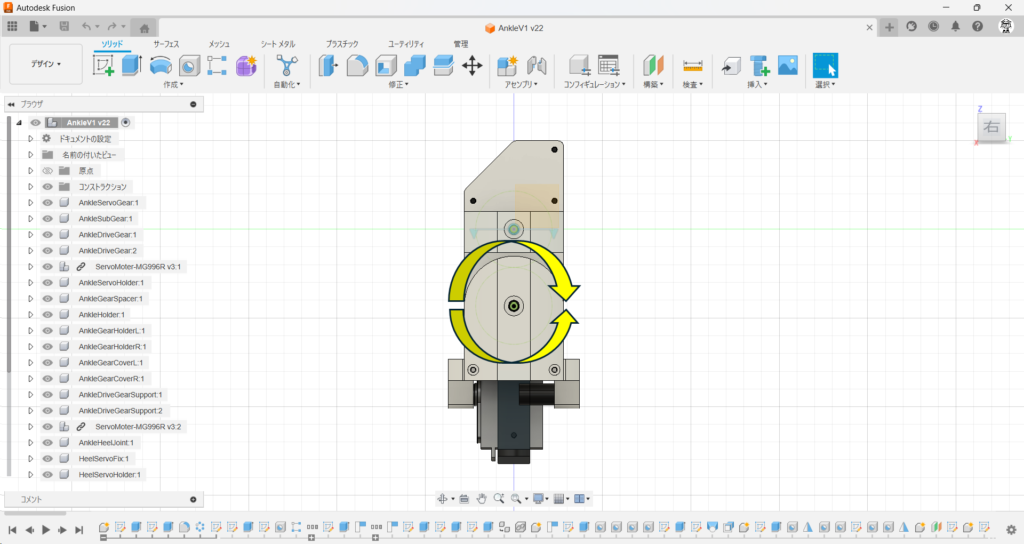
もう1か所は、体重移動のために左右に重心をずらす動きです。
実際に組み立てた後の写真です。(少し見切れてます)

足の設計と組み立て
足は、親指とそれ以外の指を動くようにしました。
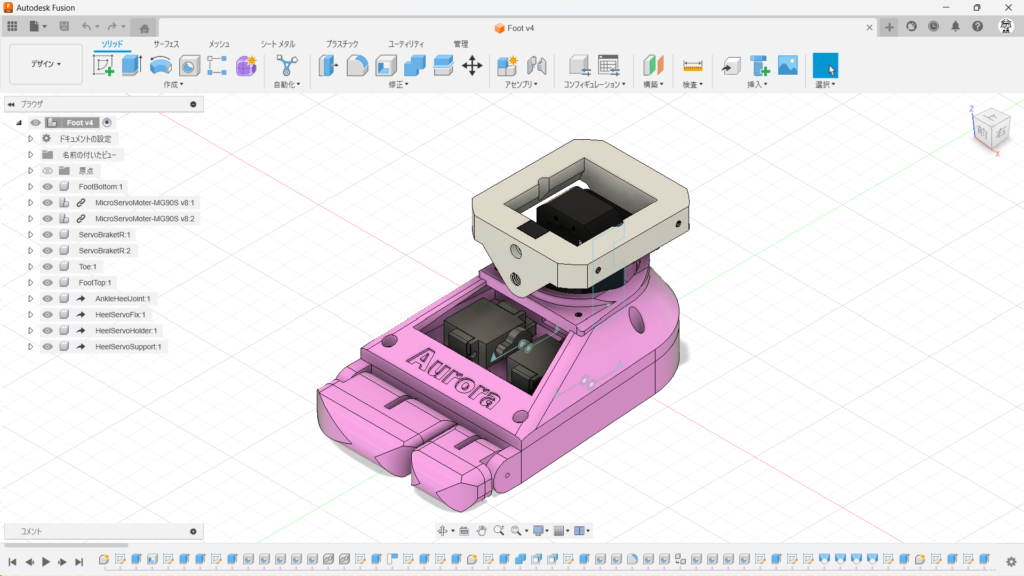
サーボモーターは、TowerPro の MG90S というマイクロサーボモーターを使いました。
トルクは低く目ですが、メタルギアなので、足の指の動作は可能なのではないかと思い採用しました。

右脚の制作動画
右脚の制作動画を作りました。15分25秒と長いですが、組み立てから簡単な動作確認まで行っています。
以上
コメント
Thanks for sharing excellent informations. Your web site is so cool. I am impressed by the details that you’ve on this blog. It reveals how nicely you perceive this subject. Bookmarked this website page, will come back for extra articles. You, my friend, ROCK! I found simply the info I already searched everywhere and simply couldn’t come across. What an ideal web-site.
Thank you. We will continue to strive to post articles that are useful to more people.