
右腕の組み立てが完了したので動かしてみる
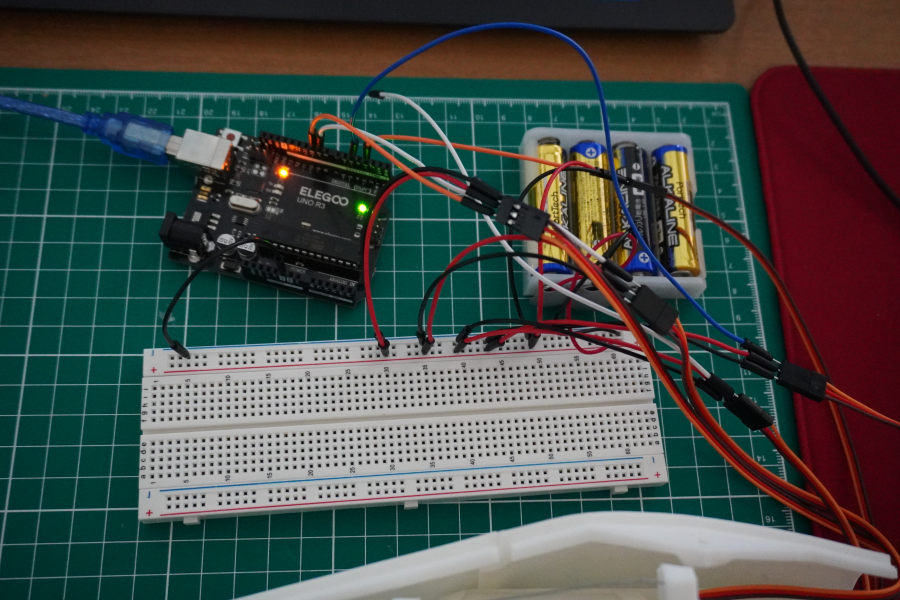
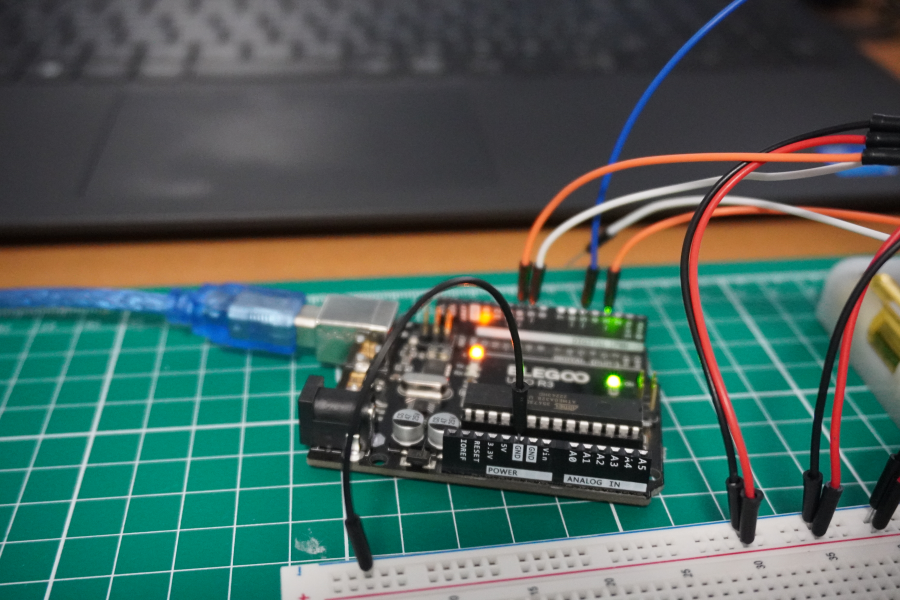
さて、右腕が完成したので、Arduinoを繋いで動かしてみようと思います。電源は、外部電源として、1.5(単三電池)を4個で6Vを供給します。写真のようにD3に小指、D5に薬指、D6に中指、D9に人差し指、D10に親指を繋ぎました。しかし、実際には中指は動かしていません。なぜなら見るからに人差し指と薬指の可動部分とぶつかるためです。
リンク
テストのためのサンプルプログラムとして、30度ずつ動かしてみました。滑らかになるように精密な制御にしたいところですが、今回は、試作品がどこまで動くかの確認用なので雑なプログラムを実行してみました。
#include <Servo.h>
Servo servo1; // 小指
Servo servo2; // 薬指
Servo servo3; // 中指
Servo servo4; // 人差し指
Servo servo5; // 親指
void setup() {
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(9);
servo5.attach(10);
}
void loop() {
for (int i = 0; i <= 120; i+=30) {
servo1.write(i);
servo2.write(i);
servo4.write(i);
servo5.write(i);
delay(500);
}
for (int i = 120; i >= 0; i-=30) {
servo1.write(i);
servo2.write(i);
servo4.write(i);
servo5.write(i);
delay(500);
}
}実際に動かしてみましたが…

まともに動きません。組み立て完了時にも書きましたが、ワイヤーが硬くてマイクロサーボでは、ほとんどワイヤーを引っ張ることができません。釣り糸にしないとダメですね。あと、サーボモータは、普通のものを使うべきでした。
組み立て時の記事
動いている動画
ということで、今後、リカバリを行ってもっとスムーズに動くように改良していきたいと思います。
以上


コメント