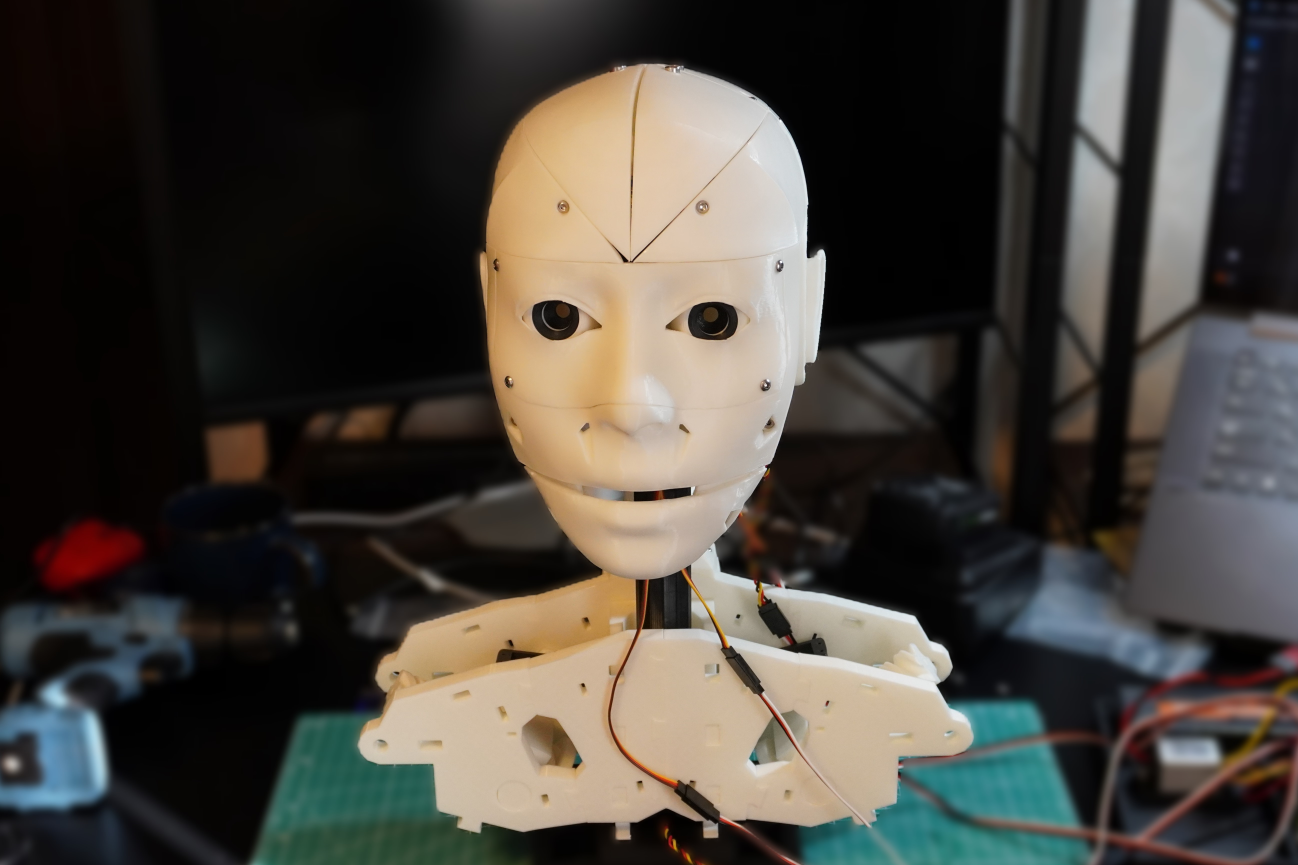
前回は、頭というよりも目だけのロボットになりましたが、今回は、かなり本格的な頭です。顎や顔もあり、見た目は、ヒューマノイドロボットの頭に進化しました。
実際のモデルデータは、InMoov のSTLデータを利用しました。完成したロボットの頭は、かなりリアルなので夜中に遭遇すると、少しビックリします。
なお、頭の制作については、多くの画像や写真で説明していますが、動画も作る予定です。

3Dプリンタは、「Creality K1 Max」を使っています。
喉(のど)の制作
InMoov のサイトからSTLファイルをダウンロードして3Dプリンタで印刷します。
なお、NeckHingeV2.stl は、古いバージョン(Neck-OlderVersion)の方からダウンロードします。

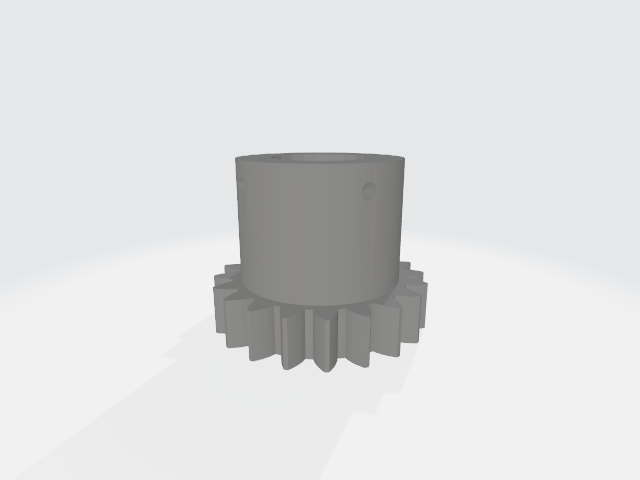
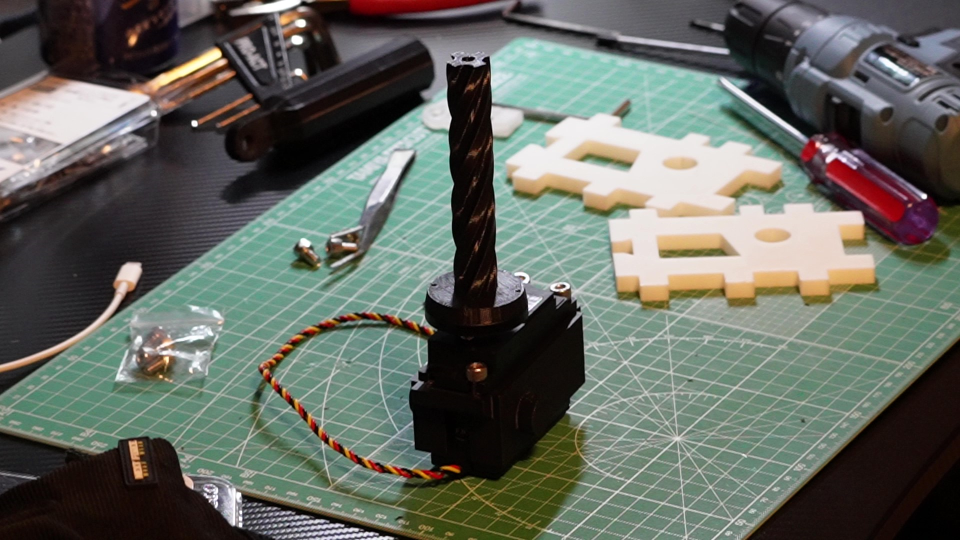
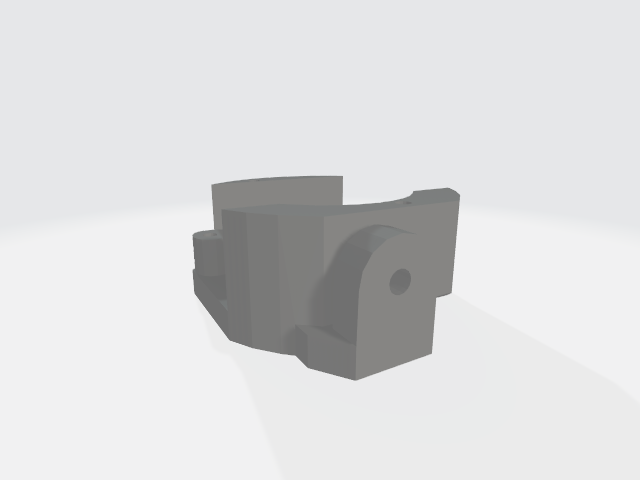
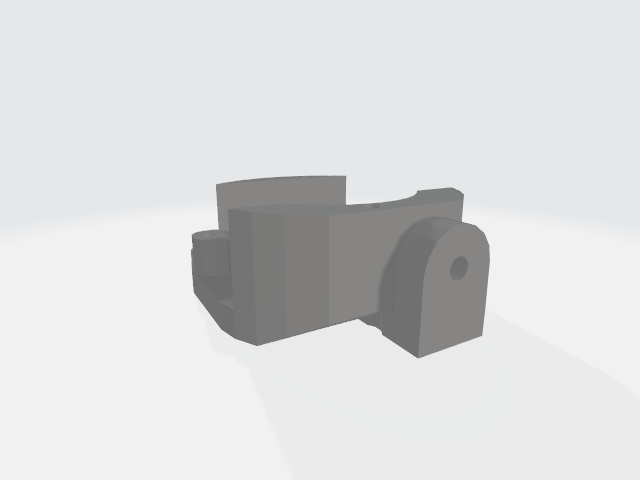
まずは、NeckHinge と MainGear を M4x10 のネジで止めます。
一応、ここでGearHolder との連結を確認しておきます。

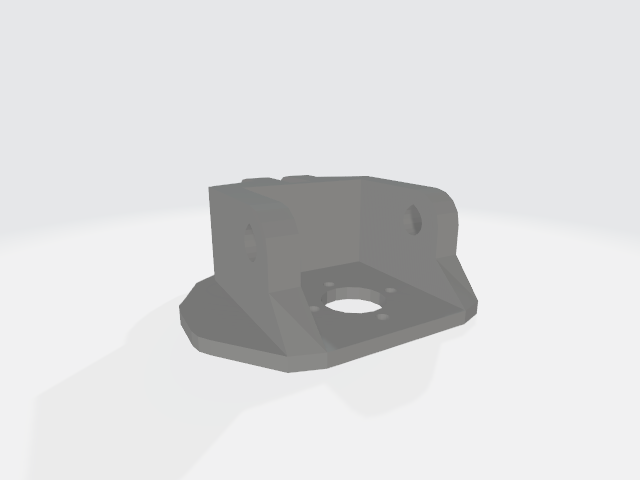
続いて、GearHolder に ServoGear と MainGear を取り付けて、ServoGear にサーボモーター HS-805BB のサーボホーンをねじ止めします。
HS-805BB は、ハイテック社のメガサーボで 24.7kg/0.14秒 と高トルク・高速で動かすことが出来るサーボモーターです。既に生産は終了しているのではないかと思いますが、オリジナルでも使っていたサーボモーターなので、Amazonで購入して使用しました。

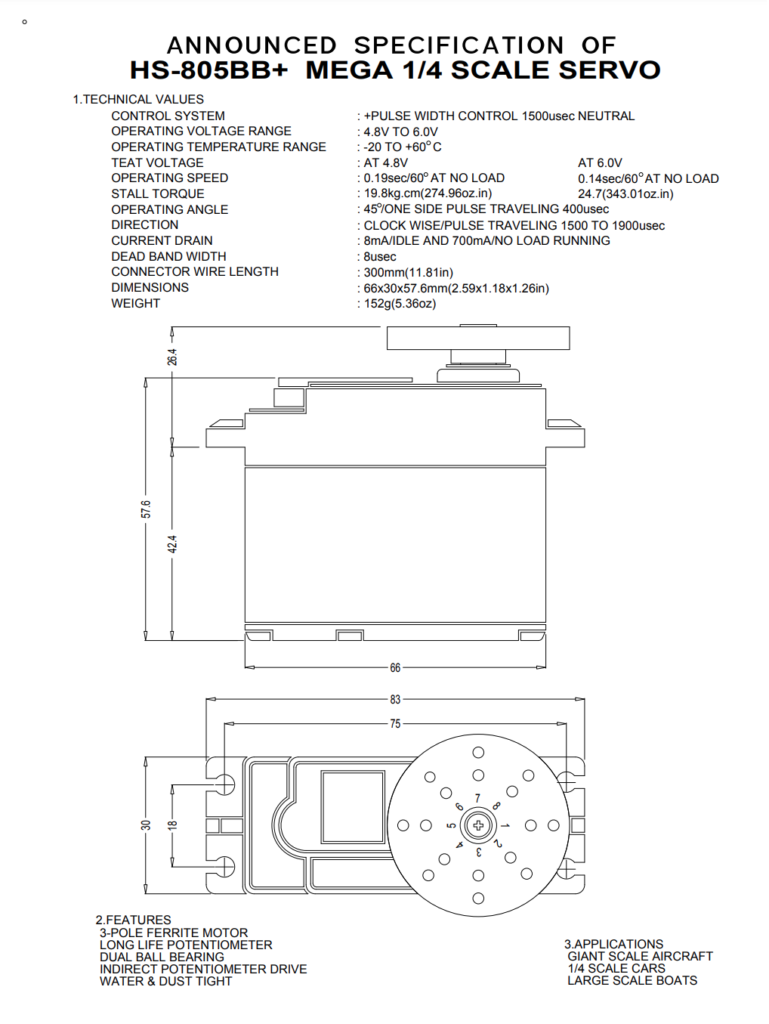
| 仕様項目 | 値 | 備考 |
|---|---|---|
| 入力電圧 | 4.8V – 6.0V | |
| スピード | 0.19s/60°(4.8V) / 0.14s/60°(6.0V) | |
| トルク | 19.8kg・cm(4.8V) / 24.7kg・cm(6.0V) | |
| 電流 | 8mA(待機時) / 700mA(無負荷動作時) | |
| 制御タイプ | JR / Futaba | おそらく |
| 周波数 | 50Hz / 20ms | おそらく |
| 稼働角度 | 0° – 180°(700μs – 2300μs) | 0° – 90°(1100μs – 1900μs) |
| 寸法 | 66 x 30 x 57.6 mm | |
| 重量 | 152g |

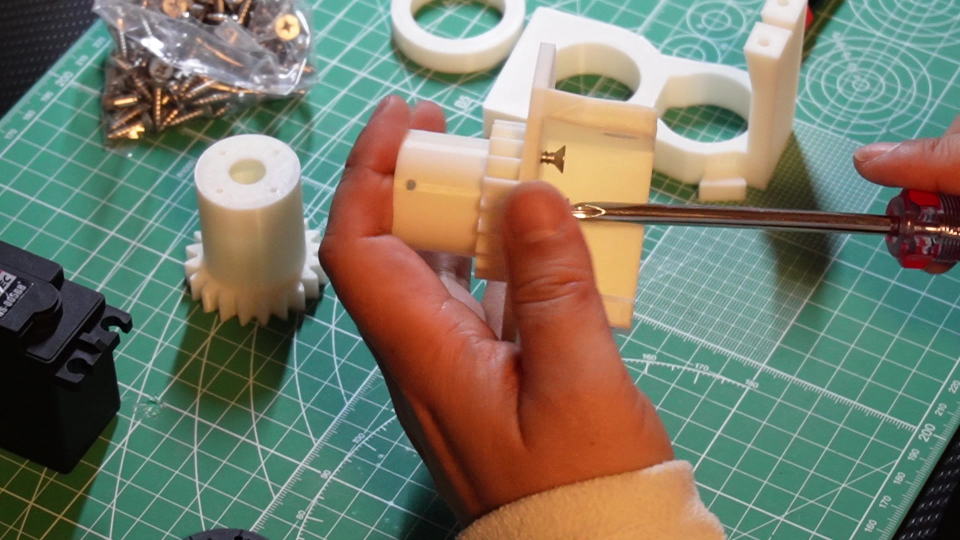
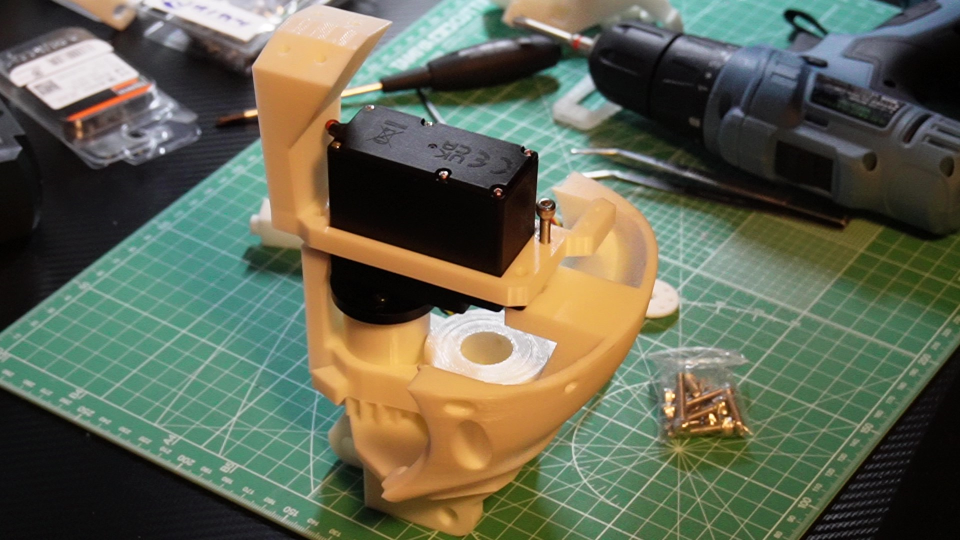
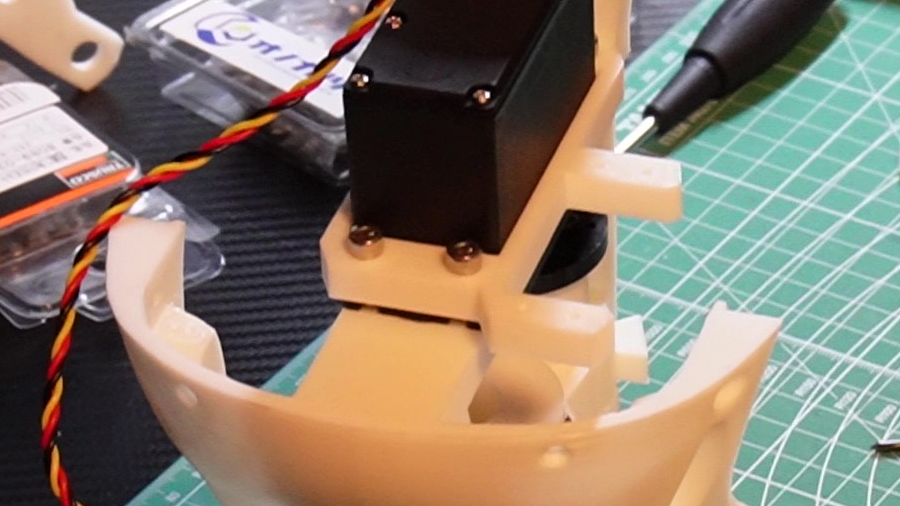
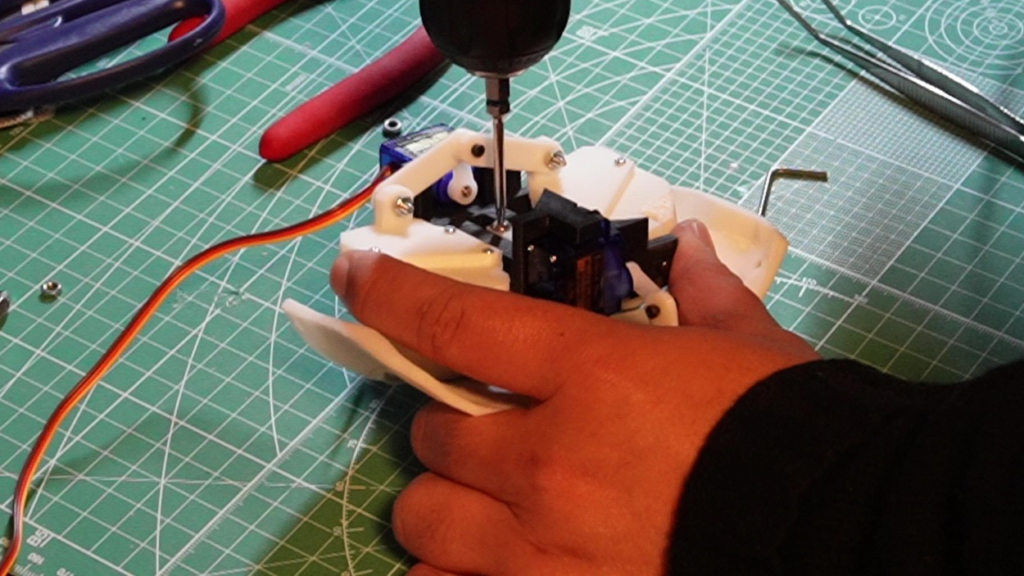
上の写真は、少し見難いですが、M3のネジで止める部分にタッピング(ネジ穴を掘る)を行っています。ServoGear に HS-805BB付属の円形のサーボホーンを M3x10 のネジで取り付けます。

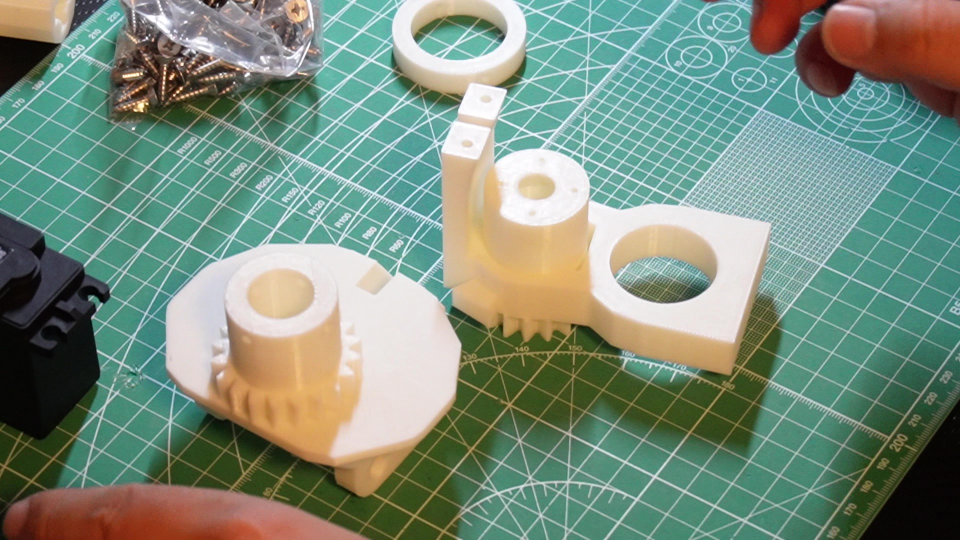
MainGear を GearHolder に取り付けて、外れないように Ring で止めます。

HS-805BB メガサーボをサーボホーンに取り付けます。

顎(あご)の制作
InMoov のサイトから STLファイルをダウンロードして、3Dプリンタで印刷します。
なお、SkullServoFixV1.stl は、Neck にあります。






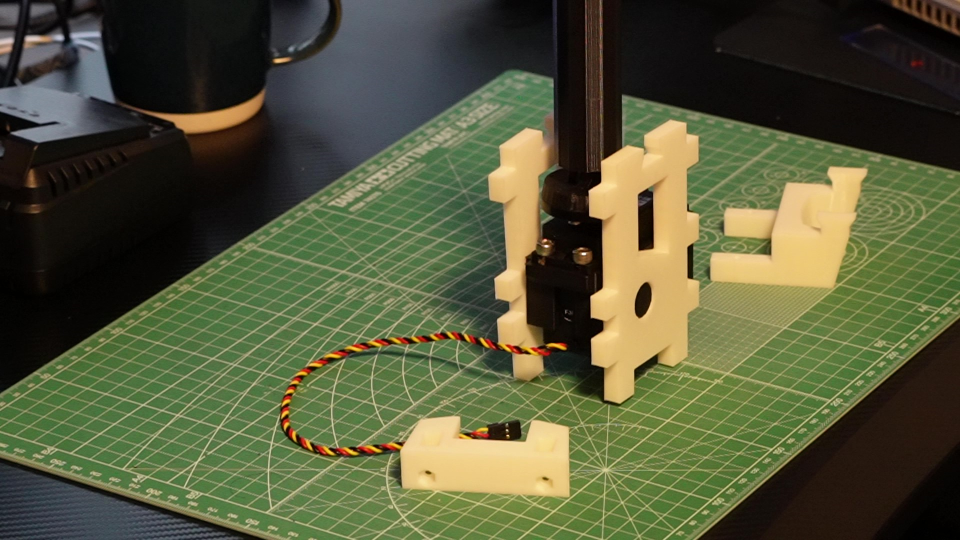
まずは、先ほど作った喉(のど)の部分に LowBack を取り付けます。

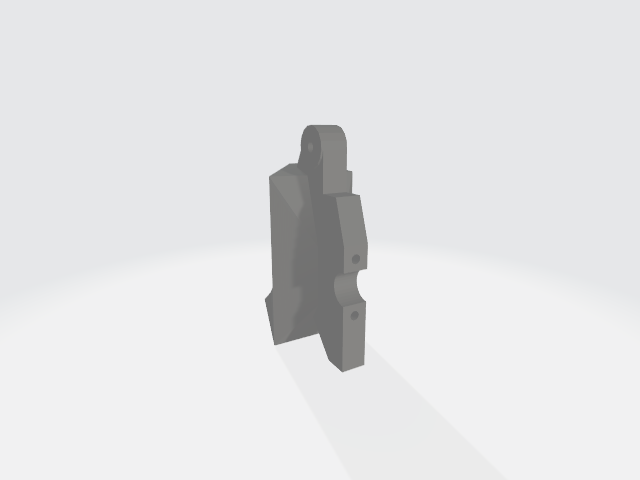
続いて、SkullServoFix を取り付けます。
顎(あご)を動かすためのサーボモーター MG996R にオリジナルのサーボホーンを取り付けて、JawPiston に取り付けて、約1cm の位置に JawHingeV1 を取り付けます。

JawHingV1 を SkullServoFix の隙間に通します。
喉(のど)の GearHolder に FaceHolder を取り付け、FaceHolder に JawHingeV3 を取り付けます。
JawSupport と Jaw を接続します。

顎(あご)に JawSupport を取り付けます。
首(くび)の制作
InMoov のサイトからSTLファイルをダウンロードして3Dプリンタで印刷します。
首以外にも Tosro の部品も使用しています。








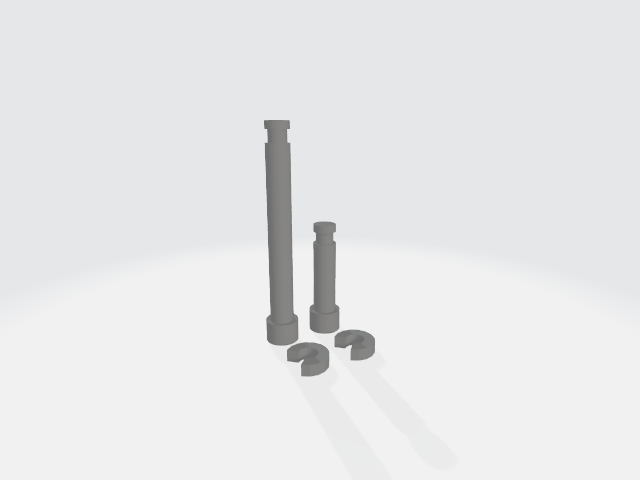

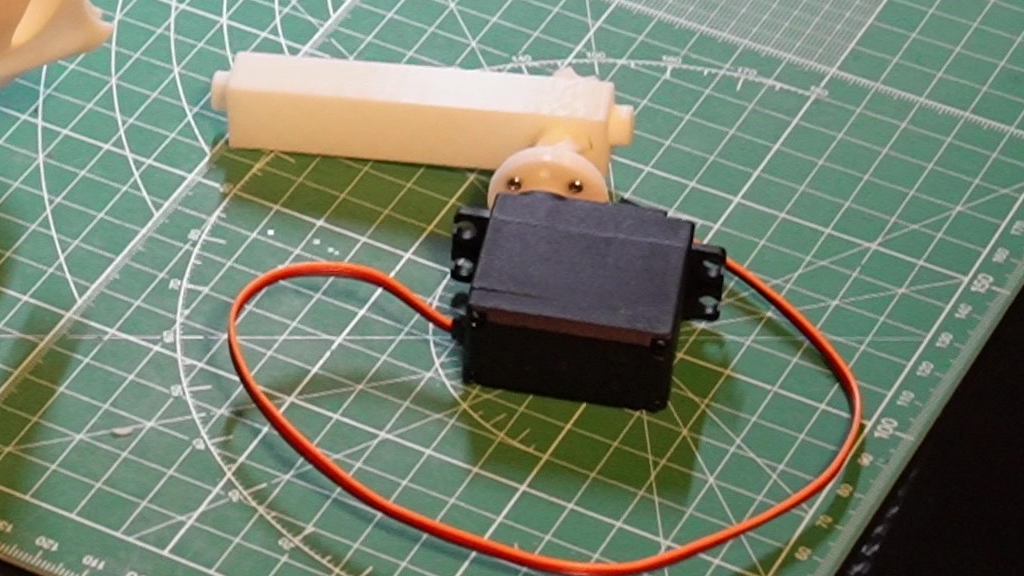
ThroatPiston をメガサーボ HS-805BB に取り付けます。
ThroatPiston と ThroatPistonBase と繋ぎます。
ThroatPiston は、紙ヤスリで表面を滑らかにした後でグリスを塗ります。
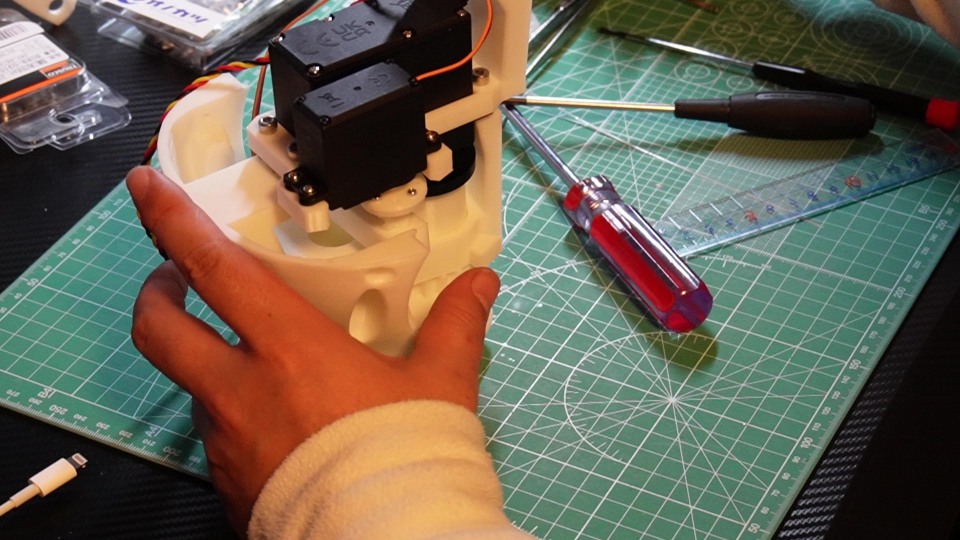
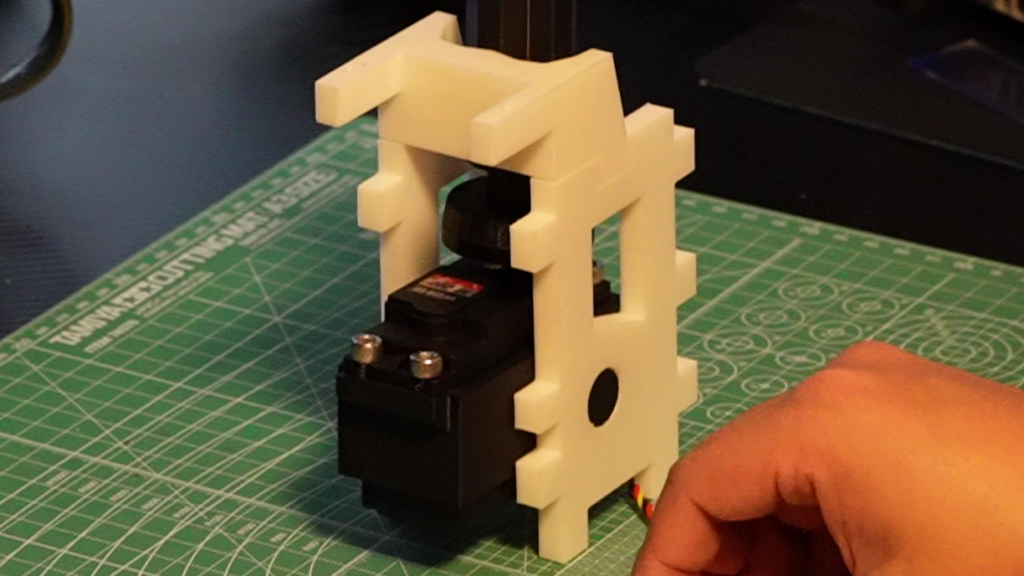
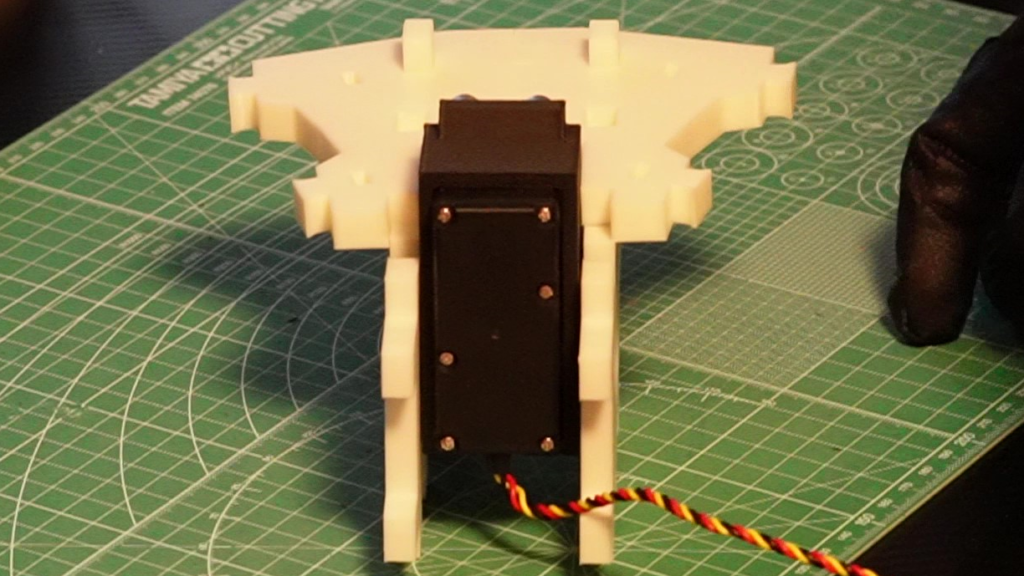
HS-805BB を ServoHolster に取り付けます。

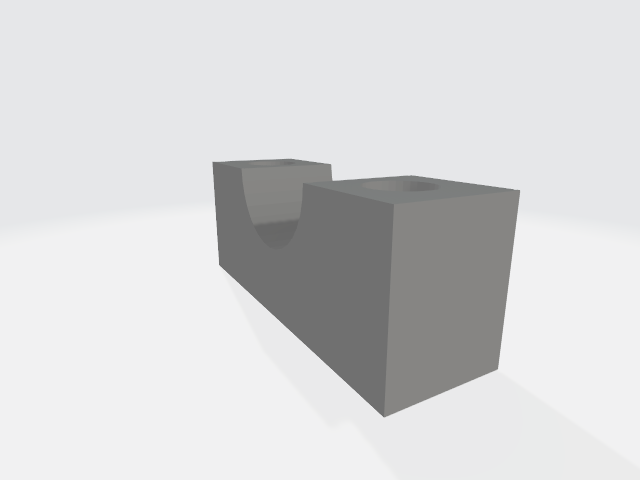
ServoHolster を ThroatLower に取り付けます。
ThroatLower に ThroatHole を取り付けます。
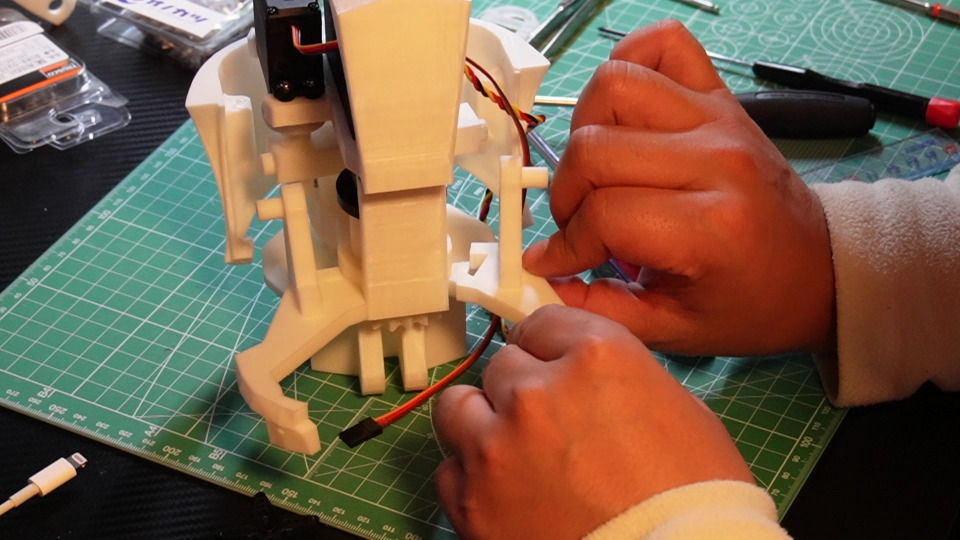
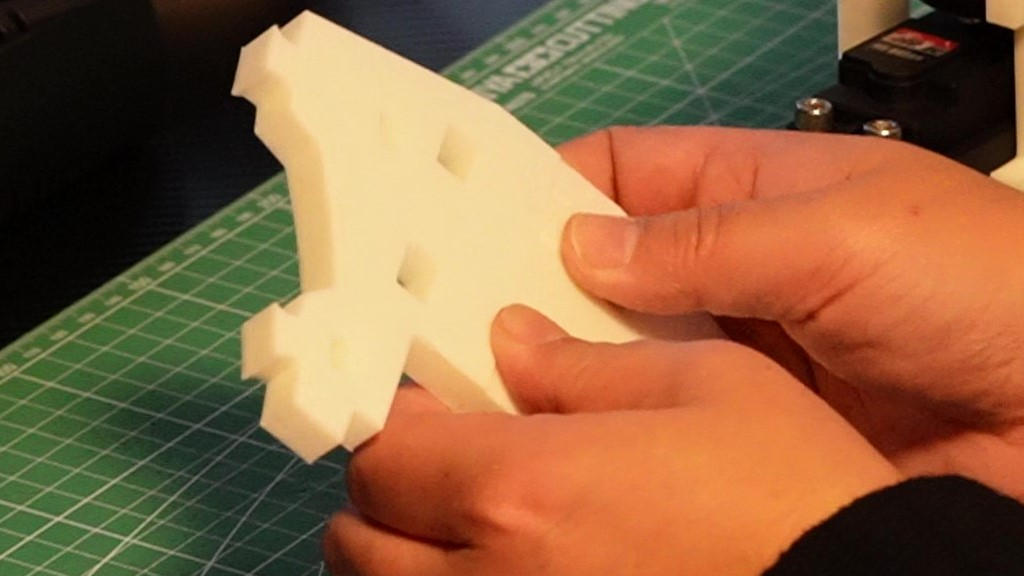
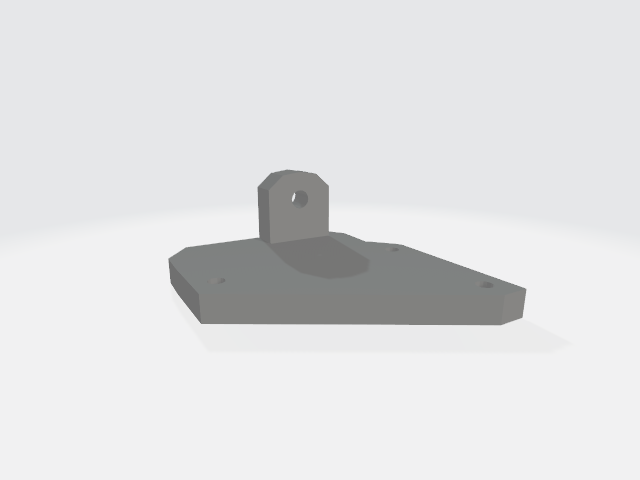
homeplateback+/- を 上の ThroatLower と ThroatHole に取り付けます。
ThroatHole に ThroatHolder を取り付けます。

ThoatHolder に Neck を取り付けます。

NeckBolts で 首 と 喉 を繋ぎます。
喉 に homeplateback+/- を取り付けます。
サーボモータを取り付けた場合は、かならずニュートラルポジションの確認のために Arduino で動作確認をしています。
眼(め)の制作
InMoov のサイトから STLファイルをダウンロードして、3Dプリンタで印刷します。





まずは、眼球を作ります。一番大きなパーツのみ白のフィラメントで印刷して、他のパーツは、黒のフィラメントで印刷しました。なお、全て 2xEyeBallFullV2.stl になっているので、スライサーソフトで切断して、別々に印刷しました。

眼球は、接着剤で接合しました。

自分が使っている接着剤のリンクを貼っておきます。別のモノでも構わないです。
EyeBallSupportLifeCamHD に EyeBall をM2のネジで取り付けます。

EyeBallSupportLifeCamHD の裏側に EyePlate をM2x10 の木ネジで取り付けます。

作った眼球を EyeSupport にM3x10のネジで取り付けます。
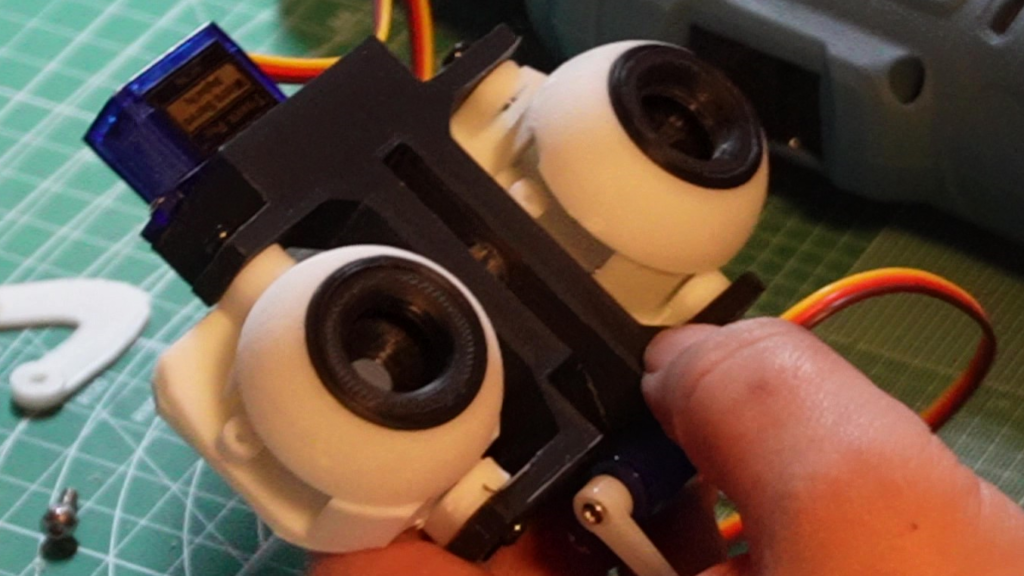
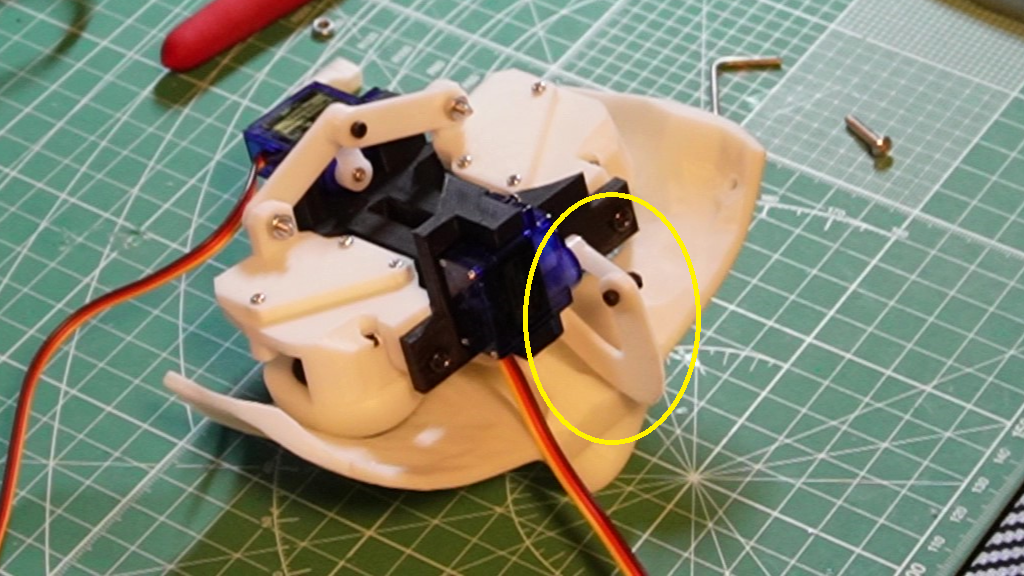
眼の後方に眼球を左右に動かす EyeHinge を取り付けて、マイクロサーボモータ SG90 のホーンに繋ぎます。

Amazon で購入するときは、日本の中小企業(こちらは、日本の中小企業のブランドの商品です。)と表示されているものを選ぶと、Tower Pro の純正品が購入できるよ!
Eyeglass に EyeToNose を取り付けて、眼 を Eyeglass に取り付けます。

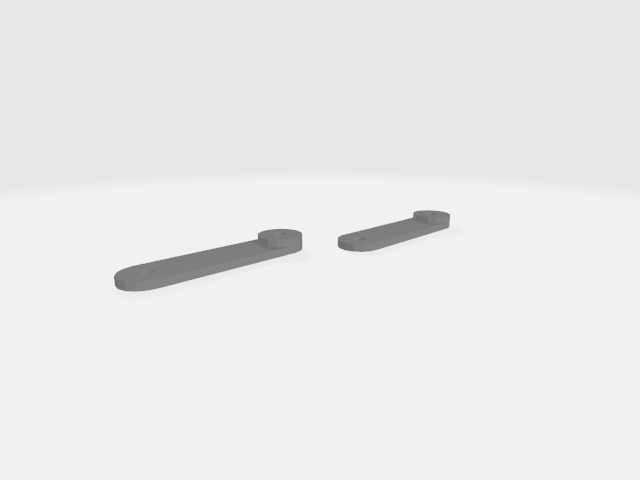
眼を上下に動かすために EyeHingeCurve をマイクロサーボモータ SG90 のホーンと EyeHinge にねじ止めします。
最後に EyeHolder をねじ止めして眼の完成です。

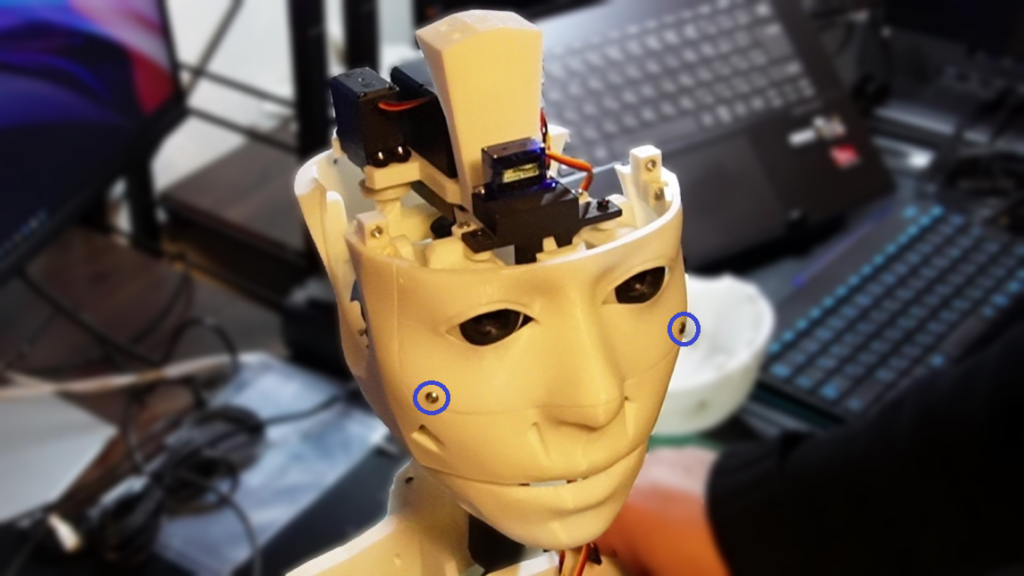
眼が出来るとヒューマノイドロボットにかなり近づいてきます。
本当は、眼にはカメラを取り付けるのですが、今回は、動きの確認が目的なのと、部品に丁度フィットするカメラが手元に無かったので、カメラを搭載していません。

頭(あたま)の制作
InMoov のサイトからSTLファイルをダウンロードして、3Dプリンタで印刷します。





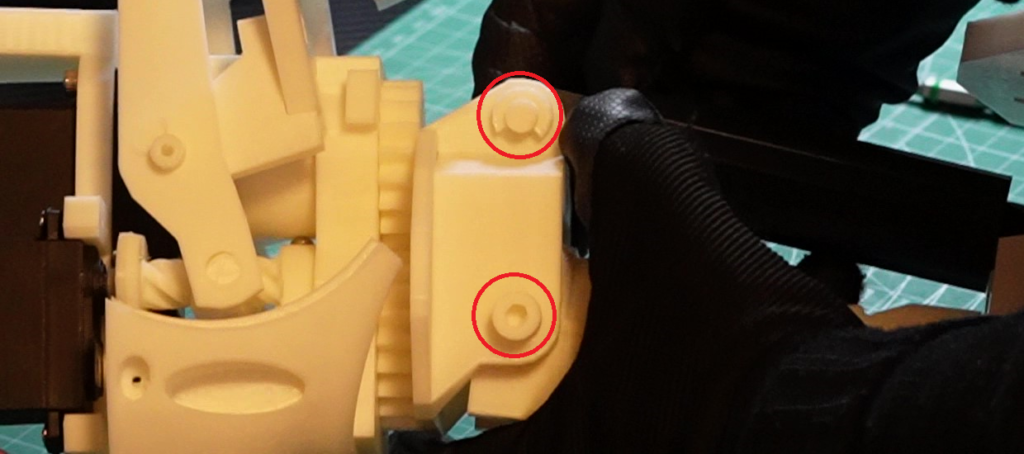
TopBackskull と TopskullLeft 、TopskullRight をM3 ネジで止めます。
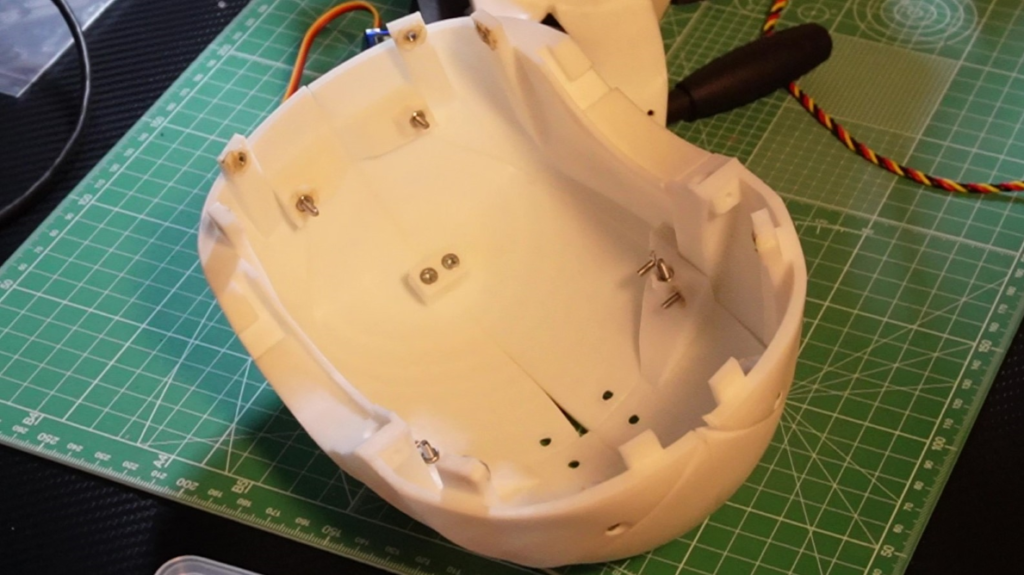
内側には、はみ出しても良いので長めのネジを使っています。また、ナット部分が少し茶色くなっている箇所がありますが、樹脂を溶かしてナットを固定しています。

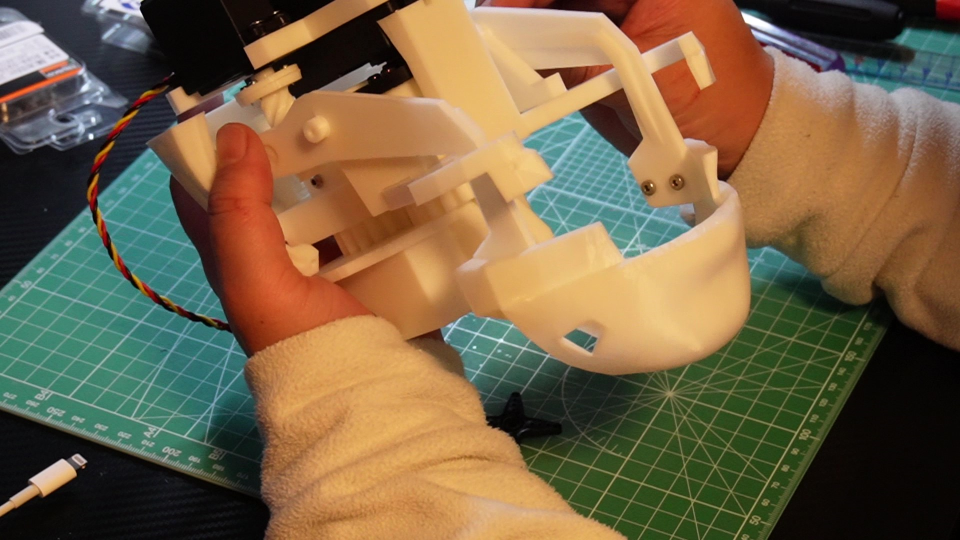
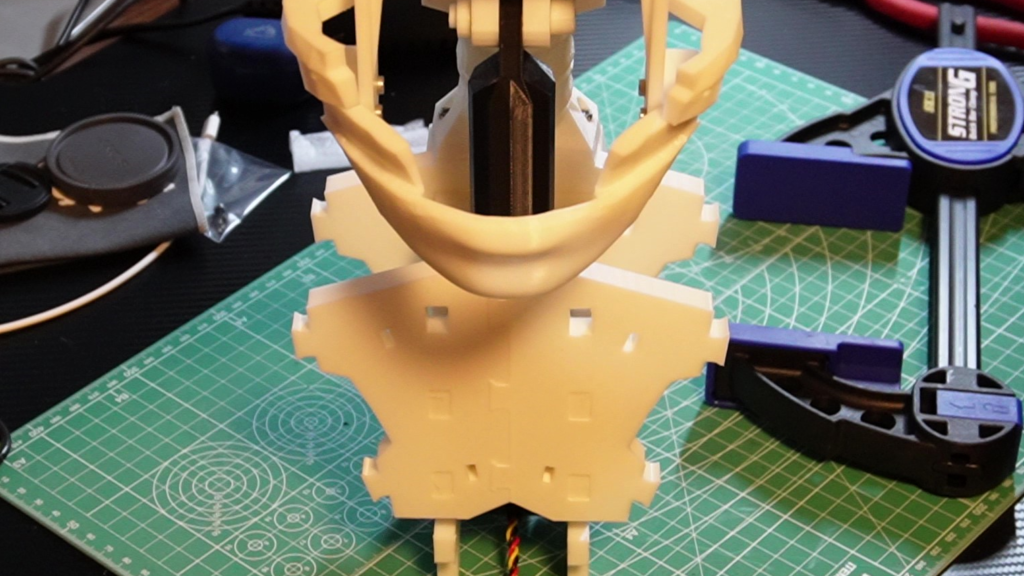
顎に SideHear を取り付けた後に、顎に眼を取り付けます。
頭を取り付けます。
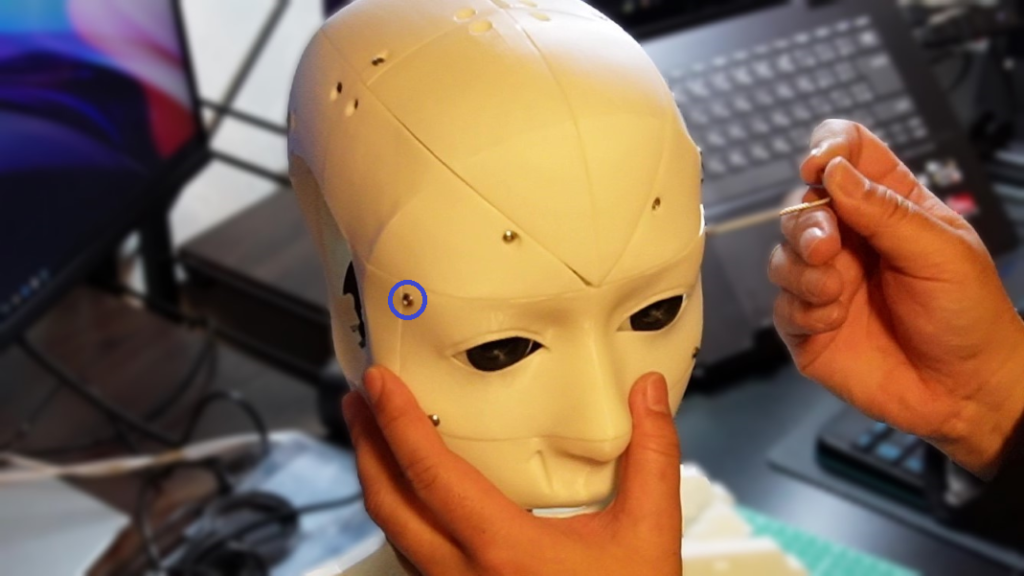

頭頂部は、M4木ネジで締めました。

耳を取り付けます。耳は、ネジではなくはめ込んで、少し回転させると固定されるようになっています。
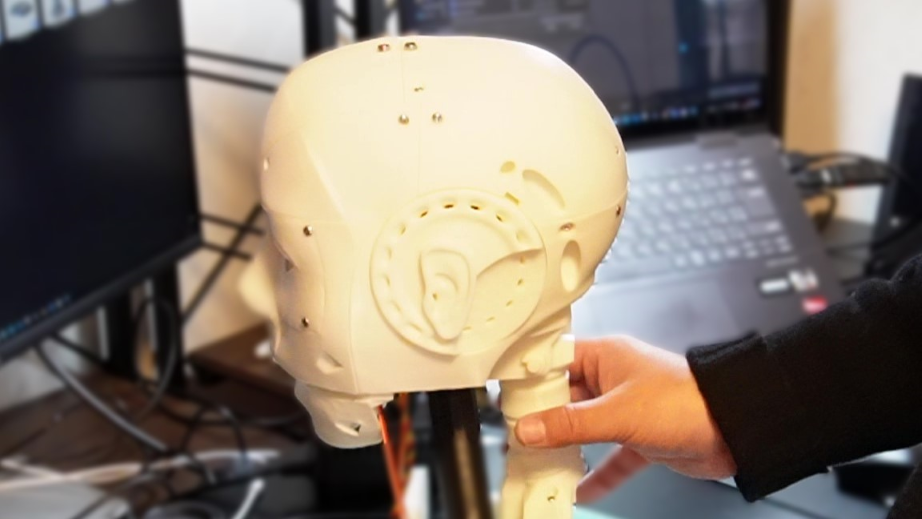
頭の完成
長い工程を経て、やっと頭が完成しました。

簡単な動作確認をしてみました。
以上


コメント