どうやったらスムーズに動くのか
暫く試行錯誤している右脚ですが、前回、動かしたときに安定感に欠けていたと感じたため、どうやったらしっかりと動く脚が作れるだろうかと色々と模索していました。まずは、ワイヤーでの駆動について、足首程度であれば問題はないかと思いますが、膝や太ももの上げ下げについては、少し心もとないと感じていました。そこで膝から上は、再設計して作り直してみようと思います。
タイミングベルトで動かしてみる
やはり一番力強く、動力の漏れを防ぐ機構として思いつくのが、ギアによる直接制御です。ただ、膝に直接サーボモータを取り付けて、動力を伝えるのは難しいため太ももに付けたサーボモータからベルト(タイミングベルト)を使って膝の駆動力にしてみようと思います。
ここまでは、ジャストアイデアで着手しましたが、タイミングベルトで膝を回転させるというのは、案外ハードルが高かったです。まず、タイミングベルトのピッチは約2mmとして、ギアを設計しましたが、全くサイズが合いません。ピッチで歯車サイズは指定できないため、モジュールに変換します。つまり、ピッチ÷π(3.1415…)の円周率で割るやつですね。2mmのモジュール幅は、0.63662 mm ですが、全く合いませんでした。何度も印刷してベルトに合わせてみるというのを繰り返して、結局、モジュール幅0.58でやっと一致しました。
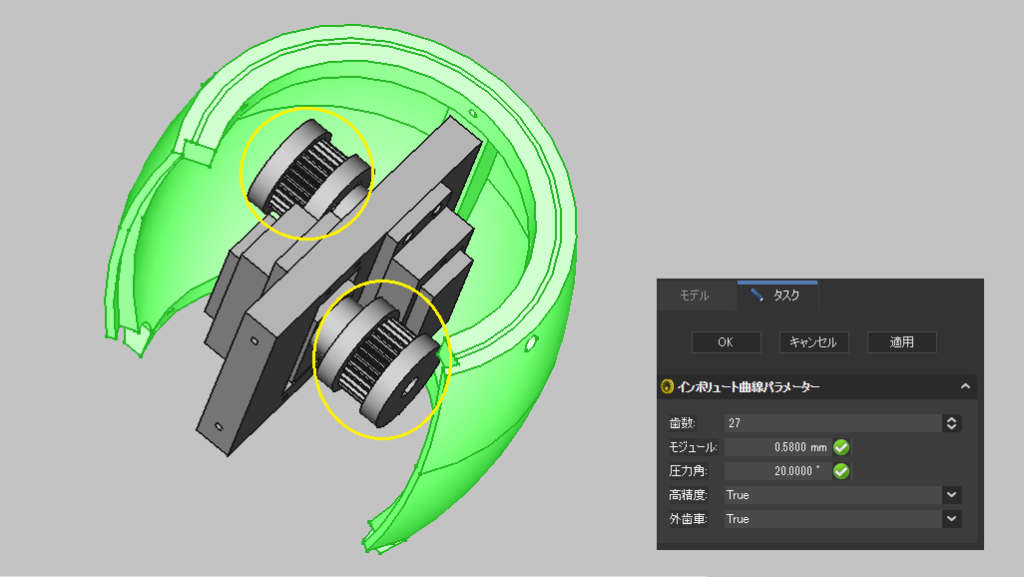
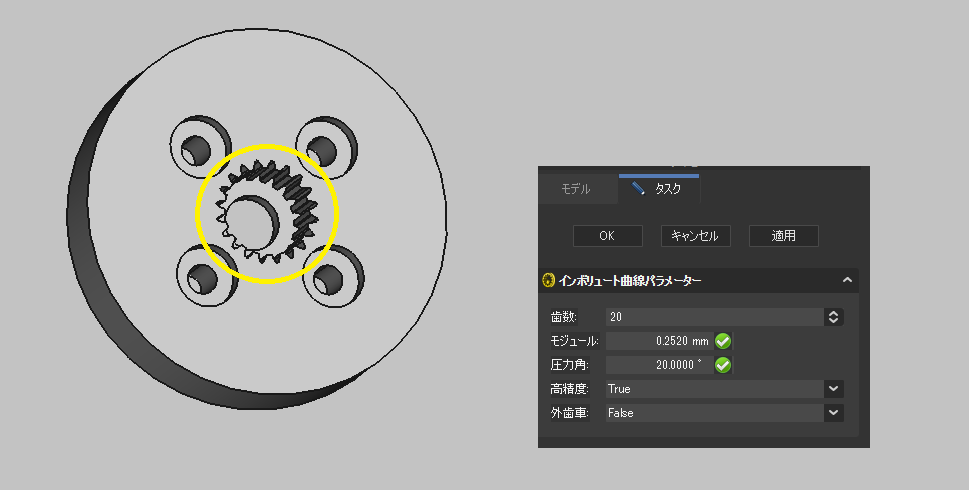
次にマイクロサーボモータのメタルギアに取り付けようとしたため、今度は、メタルギアとの噛み合わせを合わせるのも何度も印刷しました。まだ、完全に安定している訳ではないですが、以下のモジュール、歯数で一応、噛み合わせは合ってきたと思います。
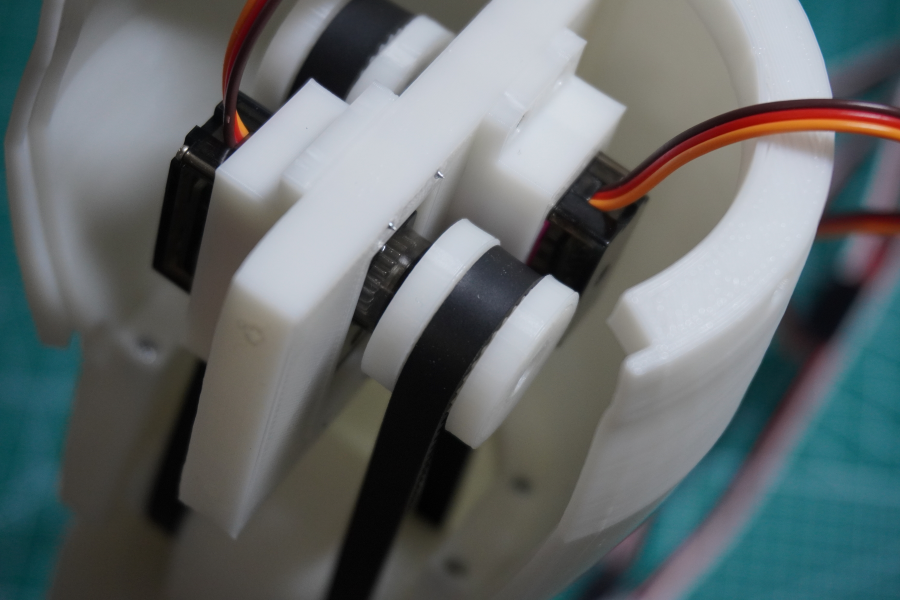
各ギアの噛み合わせは何とか合わせることが出来ましたが、タイミングベルトの取り付けが非常に難しかったです。まず、タイミングベルトを想定の長さで切り、その切断面を接着剤で取り付けて輪を作りますが、上手く接着できなかったり、切りすぎてギアに取り付け出来ないなどで何度もやり直しを行いました。
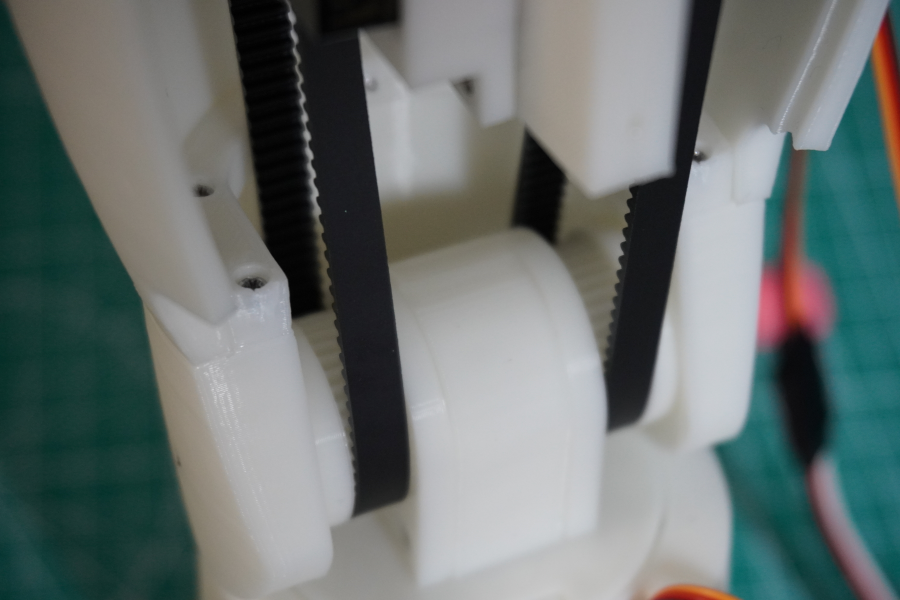
試行錯誤の末に以下のように何とか取り付けすることが出来ました。
動かしてみる
んん?何か動きが悪いです。こんなはずじゃなかったのですが、動力は十分なはずなのに膝がちょっとしか上がりません。
電池残量って大事ですよね!
何か弱いので、これは、電池が無くなってきている?とおもいテスターで使っている電池の直流電圧を測ってみました。
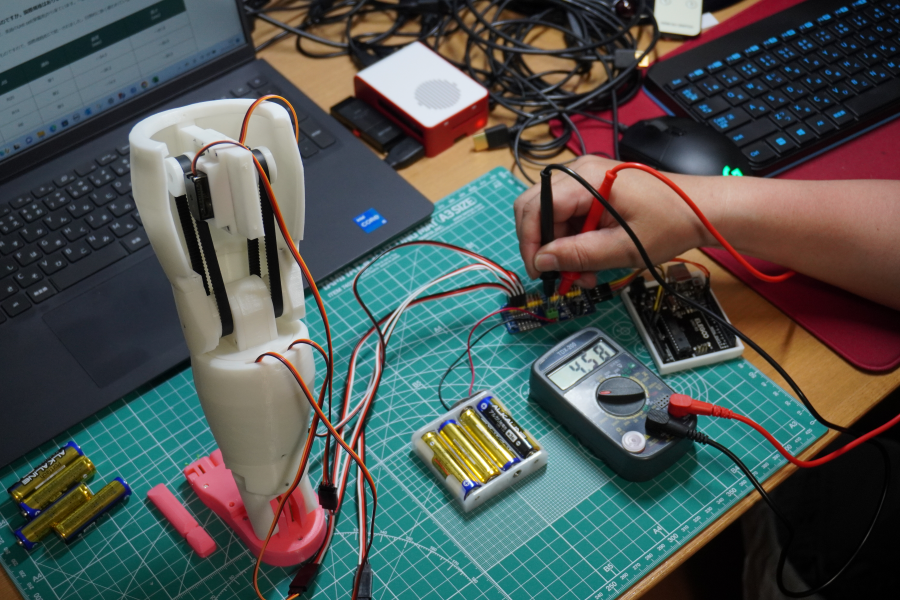
4.58Vです。異常に悪いというものでもないですが、直流なので1.5V4本の電池が本来であれば6Vになるはずが、約1.14V4本で4.58Vの結果になっています。取り付けてあるマイクロサーボモータ(MG90S)のVCCは、4.8-7.2Vです。下限を下回っています。
そこで、新品の電池に入れ替えて再度、直流電圧を計測してみました。
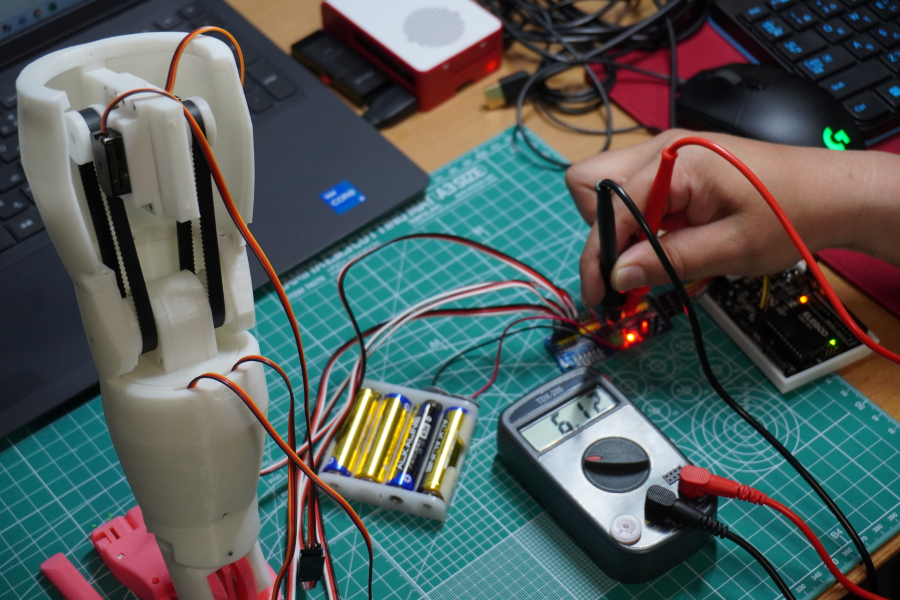
6.12Vです。そうです。電池を消耗していました。将来的には、バッテリーでの駆動を考えていますので、電池での駆動テストは、最初のうちだけと思っていましたが、テストでも電圧チェックは必須だなと思い知らされました。
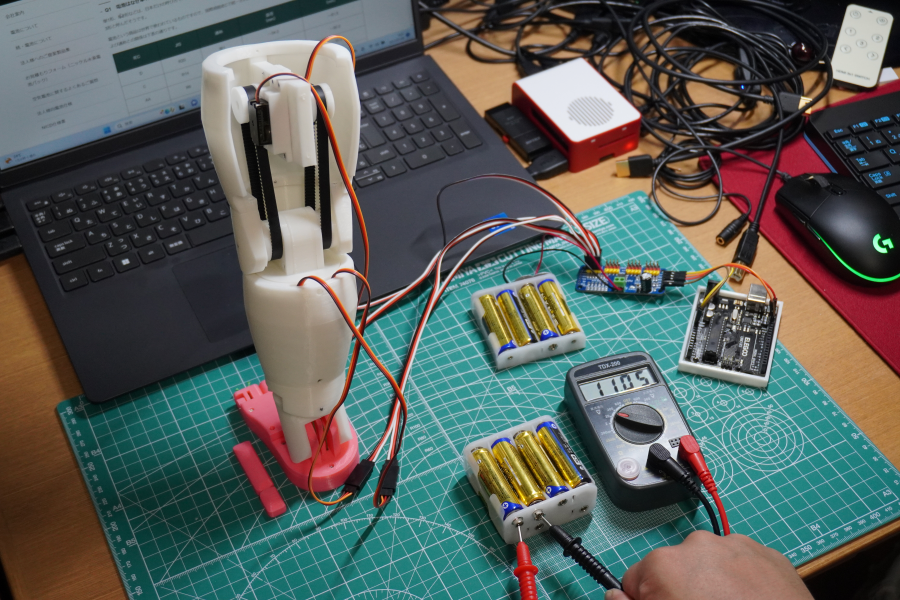
ちなみに8本電池ケースに新品4本と先ほどのかなり消耗した電池4本を入れて直流電圧を計測すると11.04Vでした。今回は使えないですが、9-12Vなどの機器には使えそうです。
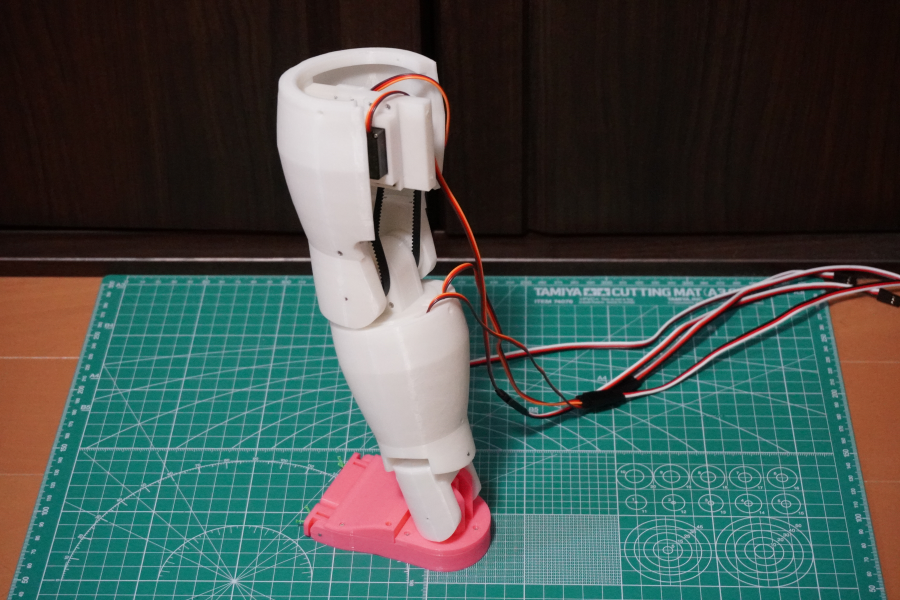
パワー満タンで動かしてみる
この動きを見たかったのです。かなり余計な時間を取られてしまいましたが、結構、満足のいく動きです。次は、太ももを同じベルト駆動で取り付けて、両足を出来るだけ早く揃えたいと思います。
以上


コメント