加工・組み立て
加工・組み立て ロボット制作 #21 四足歩行ロボットを作ってみる
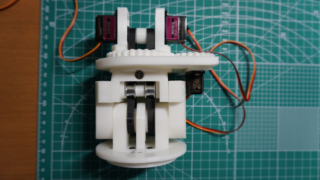
今回は、四足歩行ロボットを作ってみた。動作確認は、アニマトロニクス制御で行ってみようと思っているけど、少し進行が遅れている。
二足歩行ロボットの脚を作っていましたが、思ったよりもバランスを取るのが難しく、もっとモーションの勉強が必要なのではないかと感じています。そこで今回は、四足歩行でモーションの勉強をしていこうと思います。サーボモータTowerPro の MG9...