タイミングベルトを使って、電池の電圧も確認して、結構満足のいく動きを見せた右膝ですが、そこから先、太もも、股関節と進むには、大きなハードルがいくつもありました。まず、アイデアが浮かんできません。少し時間がかかってしまいましたが、次のステップに少し進みましたので記事を掲載します。
6軸ジャイロセンサの取り付け
現在は、私自身が動作(モータ制御)をプログラムして動かしていますが、それが本当の目的ではありません。運動に関しても自律、学習して成長できるロボットをつくりたいと思っているので、何かしらのフィードバックが必要になります。そこで膝と太ももにジャイロセンサ(MPU6050)を取り付けたいと思います。今回は十分な活用ができていませんが、今後、制御した記事も載せていきたいと思います。
6軸ジャイロセンサを購入したのは良いですが、取り付けするにはハンダでの溶着が必要になります。ハンダを使ったことはあります・・・しかしブランクが長すぎます。手元になかったのでホームセンターでハンダごてを購入して溶着してみました。
いやいやいや、こんな不揃いなハンダ付けがしたかったのではないです。様々な要因が重なったのだと思いますが、これは練習+チート工具が必要と考えました。まずは、安定したハンダ付けのためにルーペ付き
まずは対象物を固定できなおかつルーペ拡大鏡のついている、ハンダごて台、次に温度調整可能なハンダごて、こちらを購入して、いざ、練習を行ってみました。・・・いや、簡単に出来るではありませんか、今は、こんな便利なものがあるのですね。感心しました。
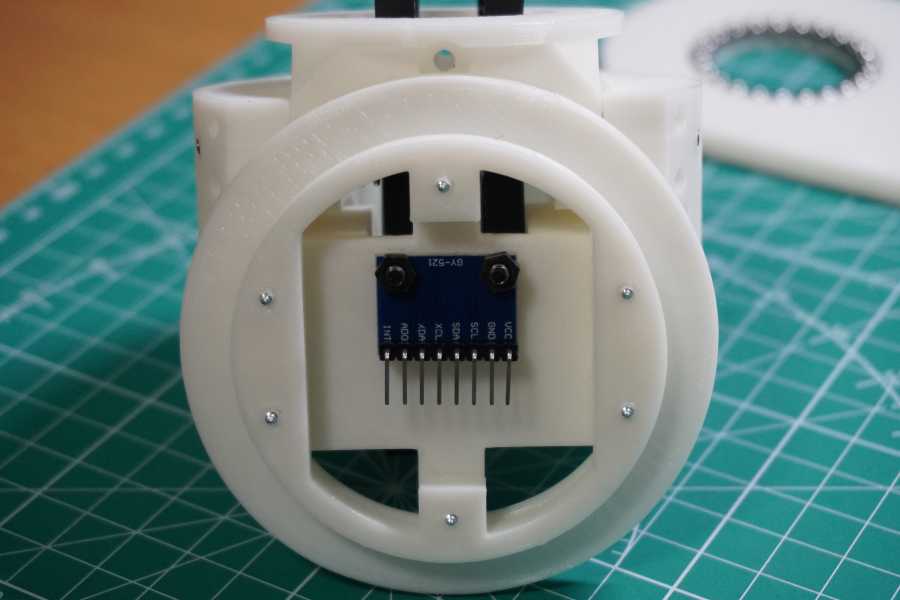
格段にキレイにはんだ付けできました。MPU6050ユニット(GY-521)を取り付けましたが、この値を取得して使ってみるのは、別の記事で行います。
設計変更
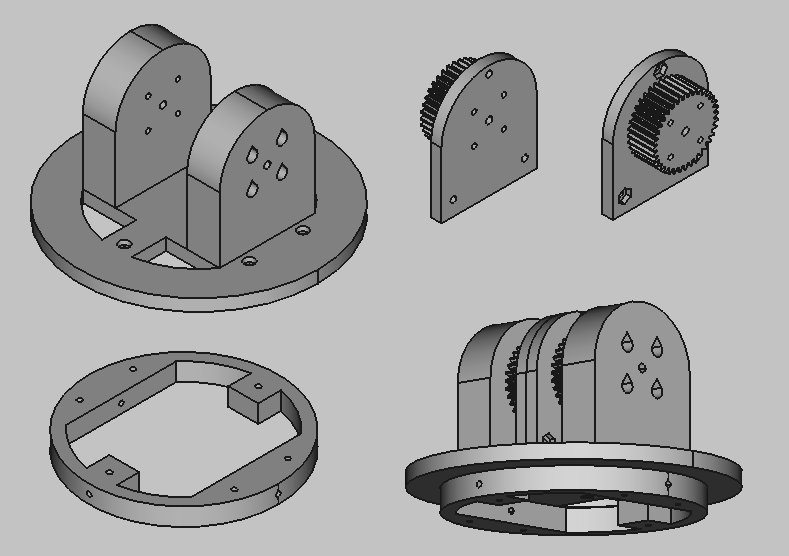
前回、釣り糸で引っ張る形で作ってみました。膝同様にベルトを使って動かす形に変更してみました。

設計した部品を3Dプリンタで印刷しました。
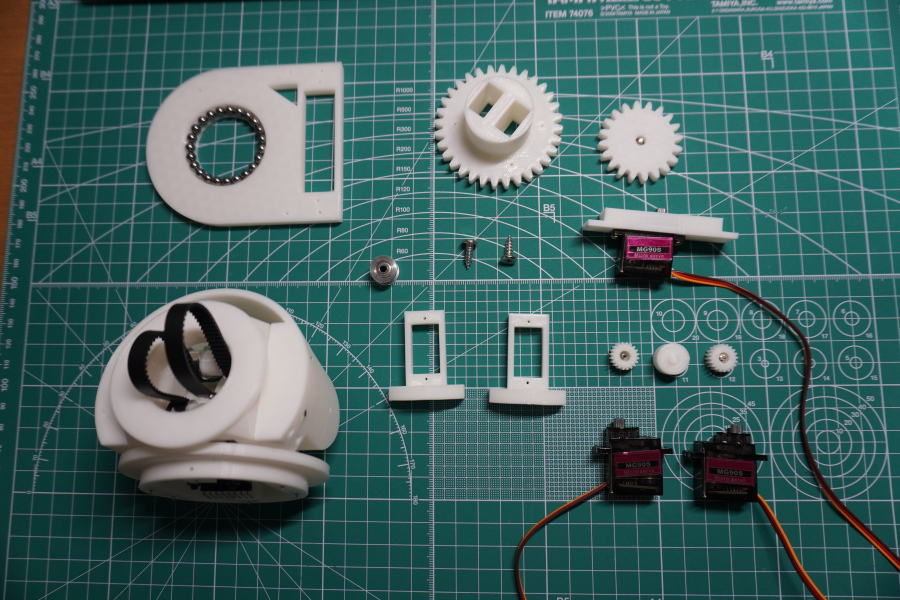
ベルトとプーリーとベアリング玉は、既製品を使いました。参考にAmazonで購入したものは以下になります。
右脚の付根を組み立ててみる
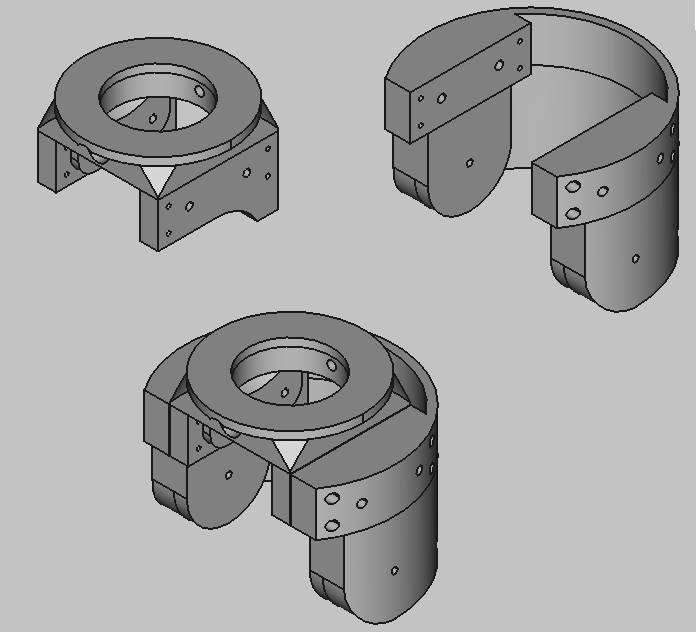
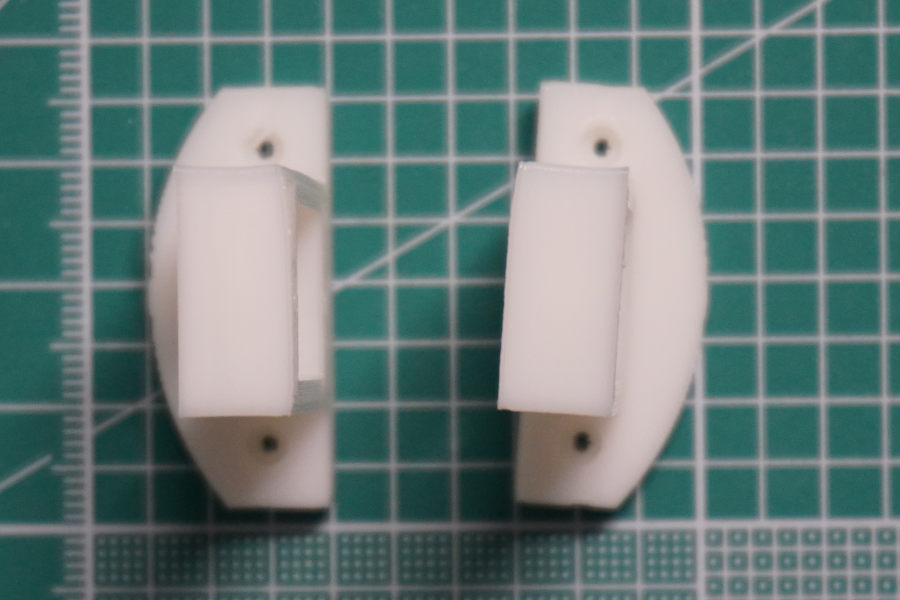
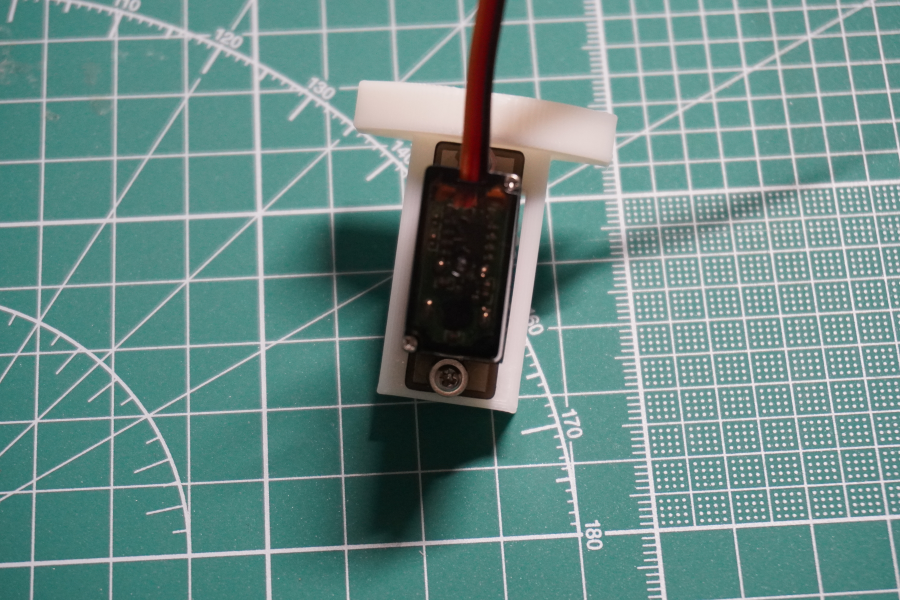
まず、太ももとの連結部分については、以下のような部品を事前に印刷して組み立てています。
足の付根部分にMPU6050(GY-521)を取り付けます。
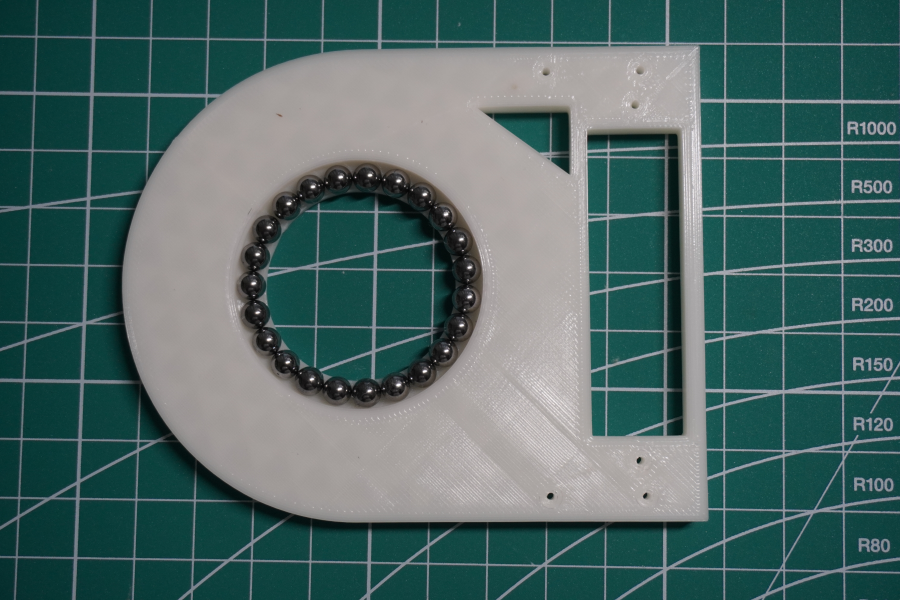
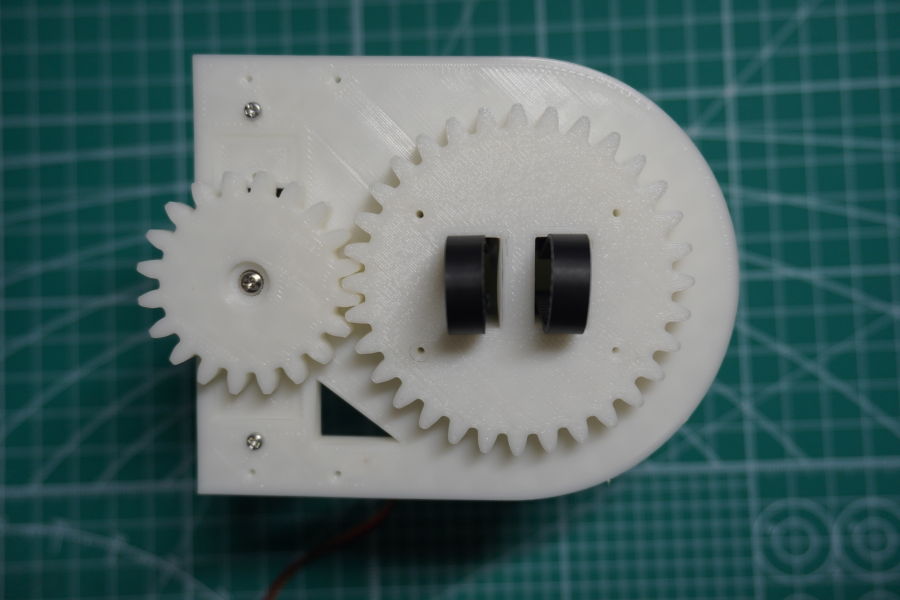
股関節の結合部分にベアリング玉を置きます。今回は、カッチリしたベアリングではないのでこの状態だと転がっていきますが、後で、他の部品で挟むので問題ありません。(本当は、グリスなどで転がりやすくするとなお良いのですが、今回は使っていません。)
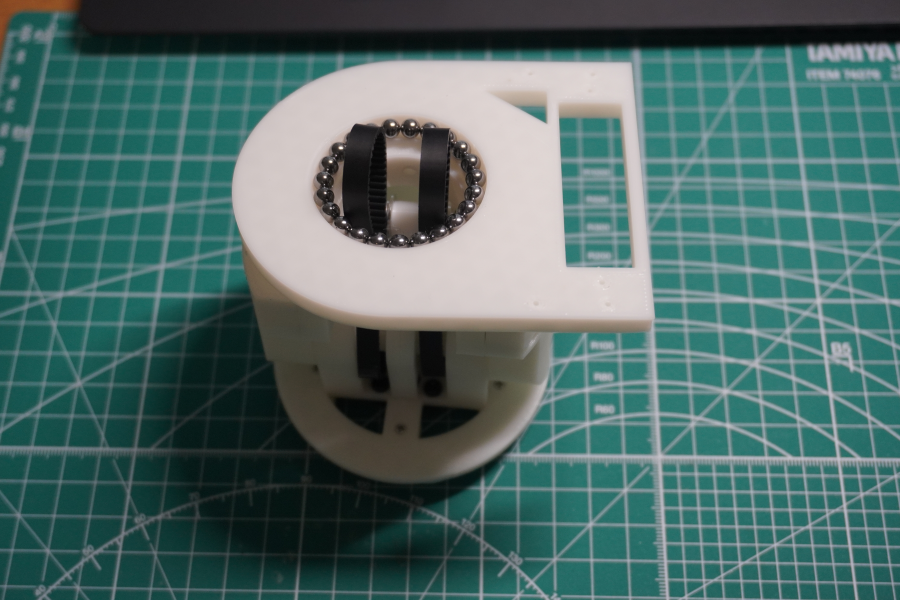
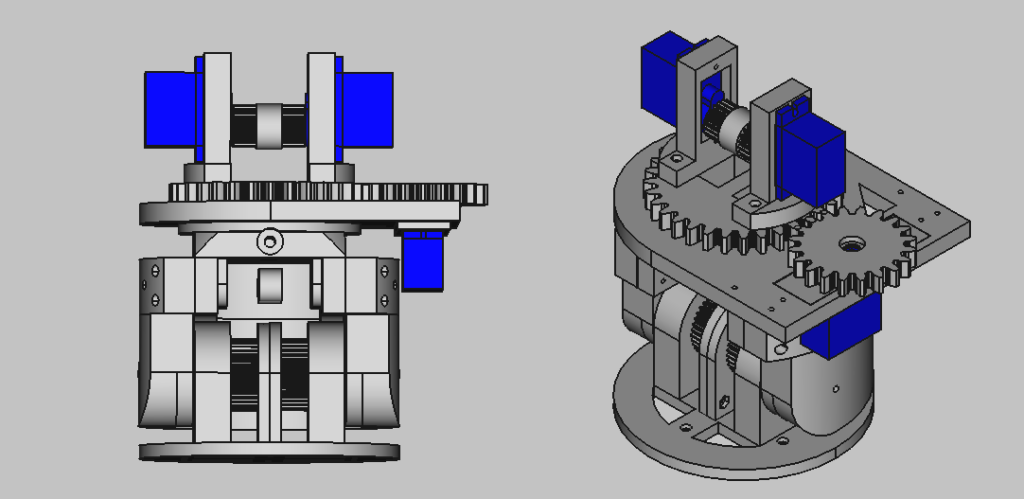
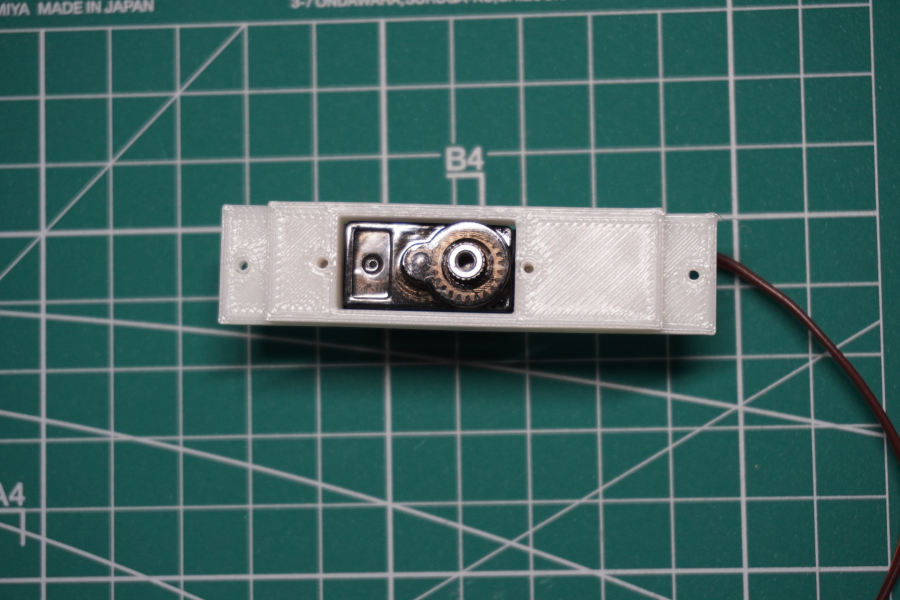
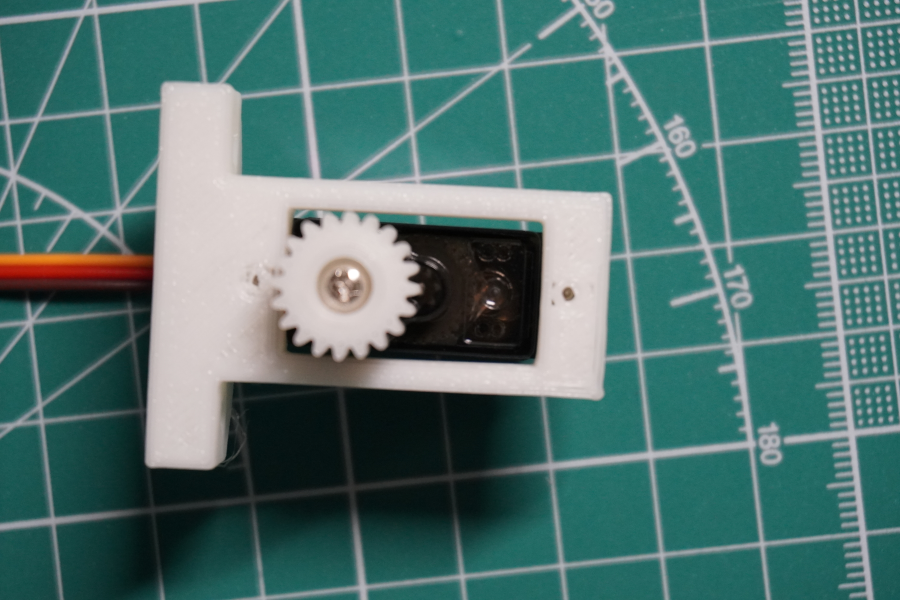
股関節の回転ギアを取り付けます。
続いて股関節を回転させるためのサーボモータとギアを取り付けていきます。

股関節と回転ギアをネジ止めします。(木ネジM4x10mm)
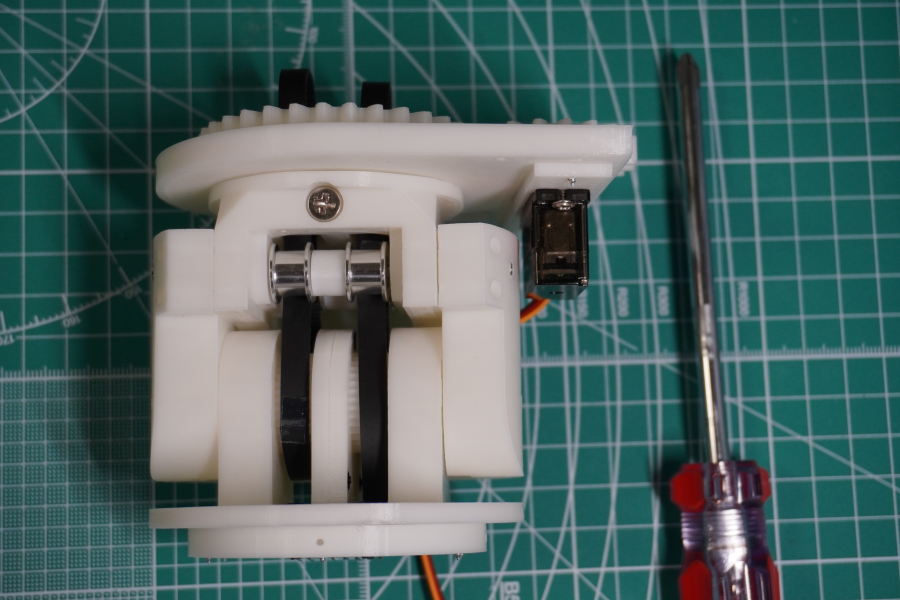
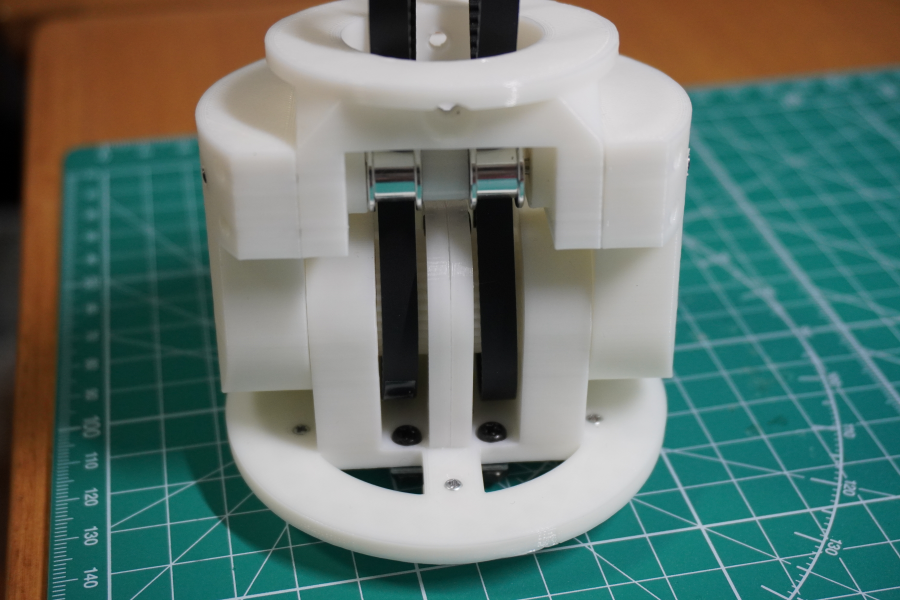
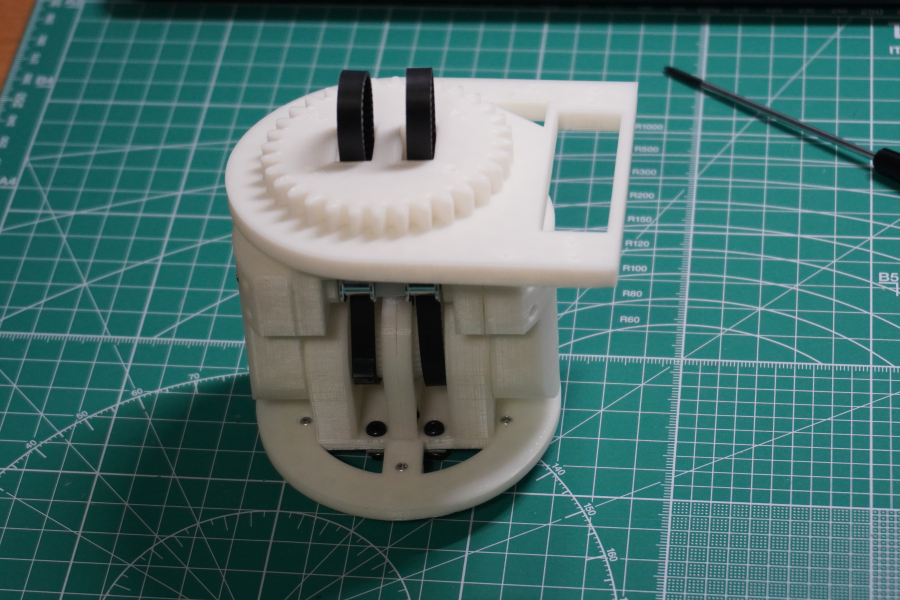
太ももを上下させるためのサーボモータを回転ギアに取り付けていきます。
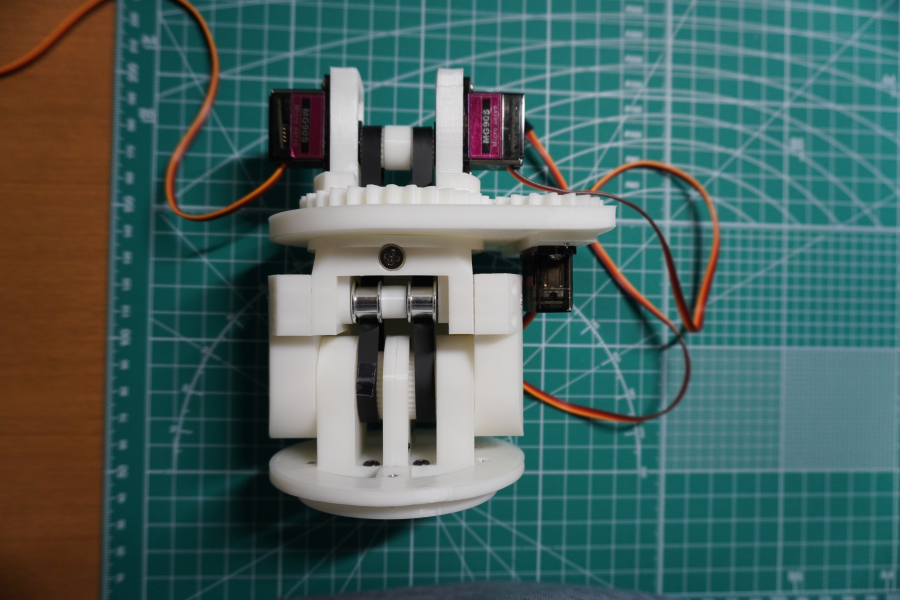
これで組み立て完成です。今回は、部品の設計がカッチリしていたので、比較的、簡単に組みあがりました。
右脚の股関節を動かしてみる
サーボモータからのフィードバック取得やMPU6050のデータを取得して姿勢認識なども行いたいのですが、今回は、大幅な設計変更と動作確認で終わりました。
以上


コメント