右脚の作り直し
1週間ほど前に右脚を作ったので少し動かしてみましたが、あまり良い動きとは言えなかったため、以下の点を修正しました。
- 足首のサーボモータの入れ替え
- 股関節の駆動部分の変更
そして、つま先を開いたり閉じたりする動きも追加しました。
変更点1:サーボモータの変更
まず、変更した理由は、重さに負けてほとんど動かなくなっていたためです。つまりトルクが弱かったということになります。純粋なモータのトルクもそうですが、今回、プーリーを自分でつくったため、どうしても隙間や3Dプリンタの歪みや誤差が加わりピッタリ形が一致する精度では作ることができませんでした。そのため強い反発力に会うとプーリーが空回りをしていました。そこで多少の誤差を吸収してくれるメタルギアに変更したわけです。少しきつめにはめ込み部分を作成し、押し込めばカチッとなりました。
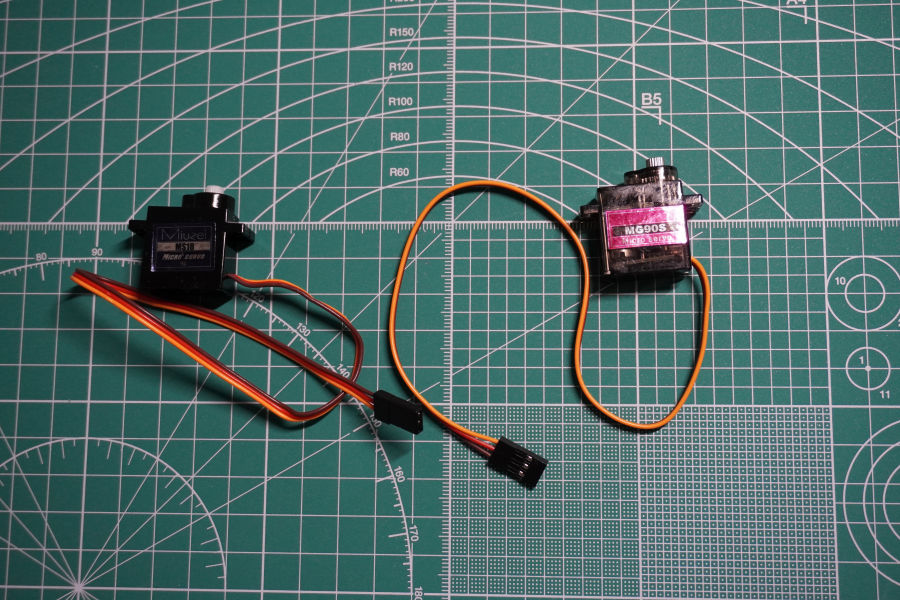
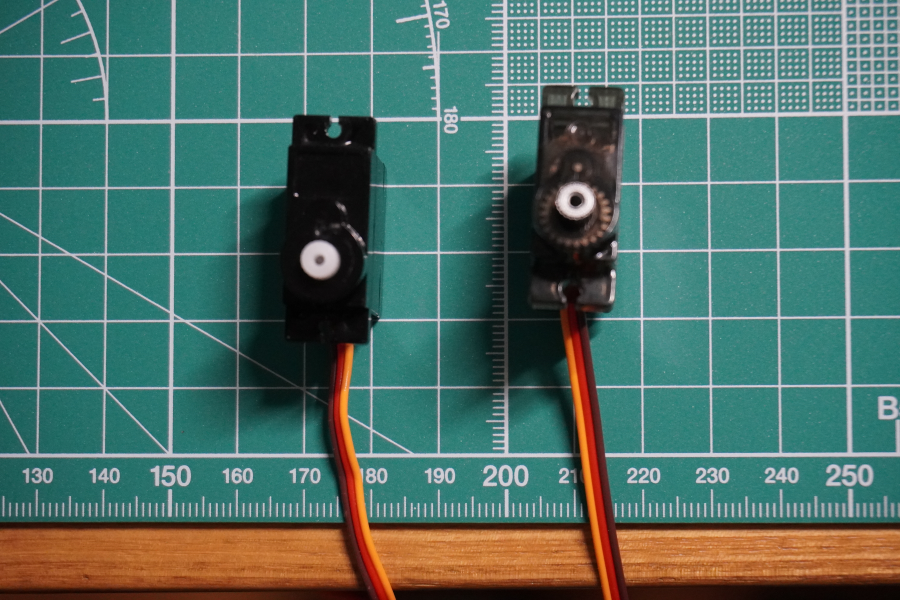
どちらもamazonで購入しました。交換前のマイクロサーボモータと交換したマイクロサーボモータは以下のものになります。
変更点2:股関節の駆動部分の変更
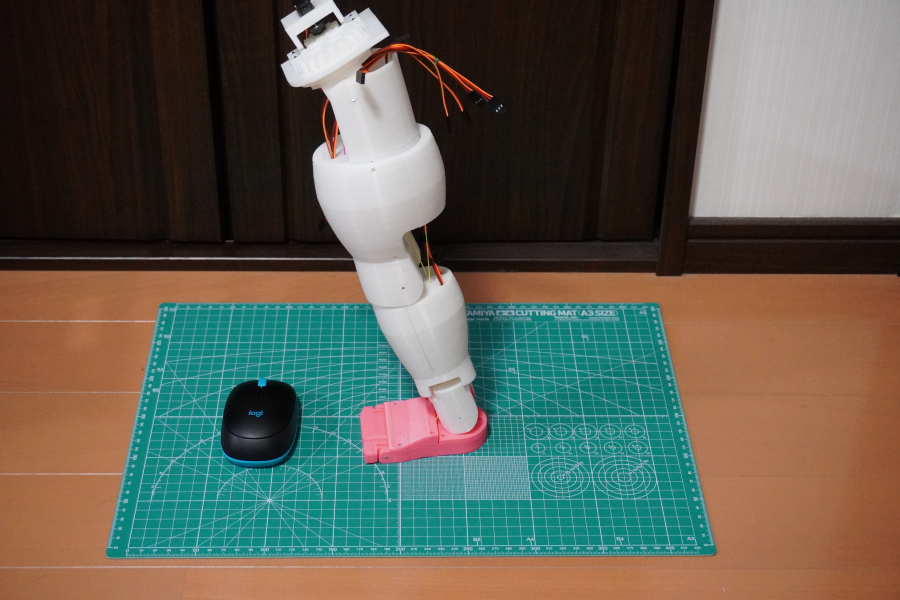
前回は、このように仮止めの状態でしたが、隙間なく上と下の駆動部分を作ったため、遊びが無くほとんど動かすことができませんでした。そこで今回は、下の写真のように極端なほどスペースを開けました。また、太腿の奥の釣り糸には、バネで少しだけ遊びを作りました。
そして動きを一つプラスしました。一番上の歯車が回転すると足全体が回転する仕組みです。例えば、サッカーのサイドキックのようにつま先を横に向けるといった動きのイメージです。しかしここで大きなミスをしてしまっていました。通常右脚の稼働する箇所は、親指が外に開くイメージですが、股関節の部品を天地逆転して取り付けてしまい、足の小指側が外に開く形になってしまいました。つまり左脚の股関節を右脚に取り付けた形になってしまいました。このリカバリには何日か要するため、本日は、このまま強行突破しました。
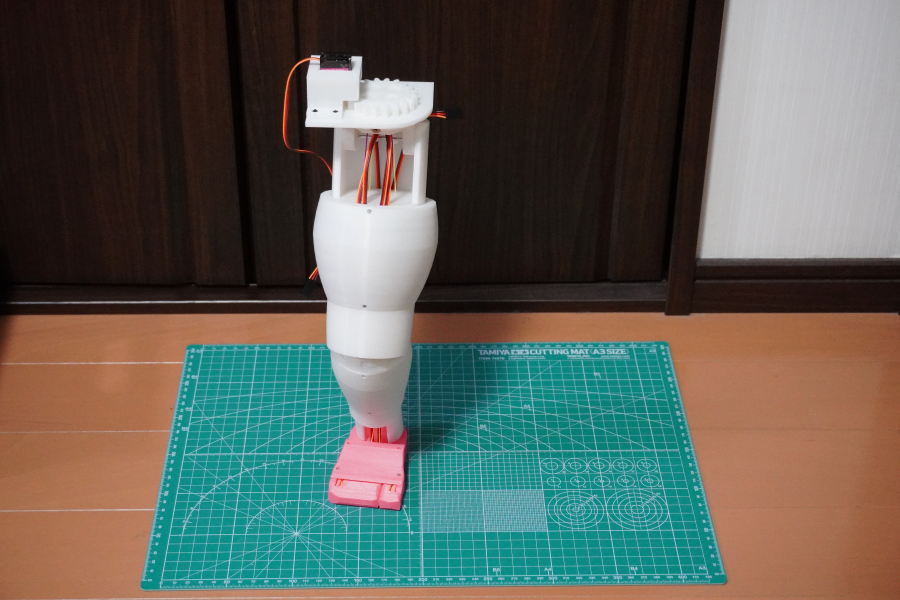
あと、動きには、全く関係ないですが、ピンク色のフィラメントを買ったので靴は、ピンク色にしてみました。
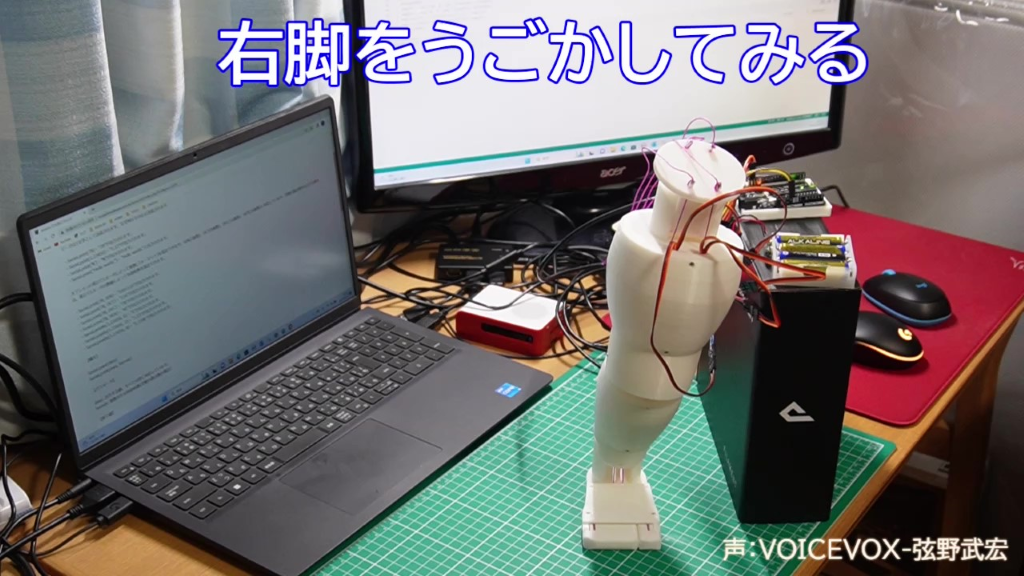
実際に動かしてみた
今回の声は、作ろうとしているロボット(アウロ)に採用したいと思っている、VOICEVOX-WhiteCULさんの声でナレーションをつけました。
まだまだ、改良が必要そうです
なんとか動いたという感じです。これでは歩いたり、ジャンプしたりといった運動にまでは繋がりそうにないです。テストしている時には、動きそうという感触はあるのですが、実際に置いてみて動かそうとすると、重力に勝てません。どうもワイヤーで引っ張るという方法だと大きな力を必要として向いていないのかもしれません。
おそらく駆動方法を見直す必要があるのではないかと思います。ギアやベルトなどを使ってもう一度、太ももの上げ下げ、膝の曲げ伸ばしをするように改良してみようと思います。
以上


コメント