右脚(膝上)の設計
前回、右脚(膝下)を制作したので、今回は、右脚(膝上)を作ってみたいと思います。FreeCADで以下のような3Dオブジェクトを作成しました。
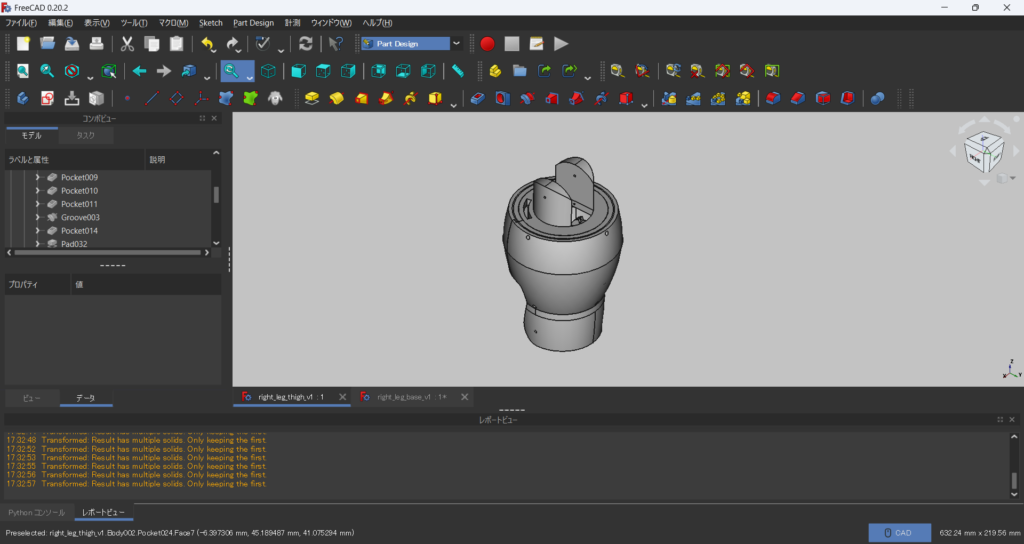
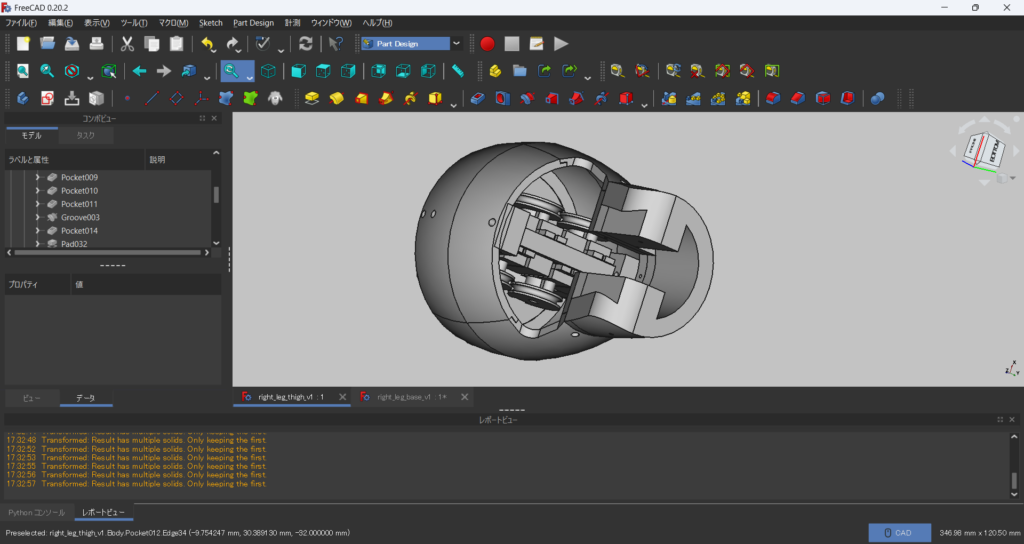
各関節は、マイクロサーボモータ2台で動かすようにしています。太腿には膝と股関節の駆動用に計4台のマイクロサーボモータを配備します。今回は、設計時点でマイクロサーボモータも入れて確認をしました。(印刷後にサイズ合わないとなると大変、再印刷が必要になるので)
右脚(膝上)の組み立て
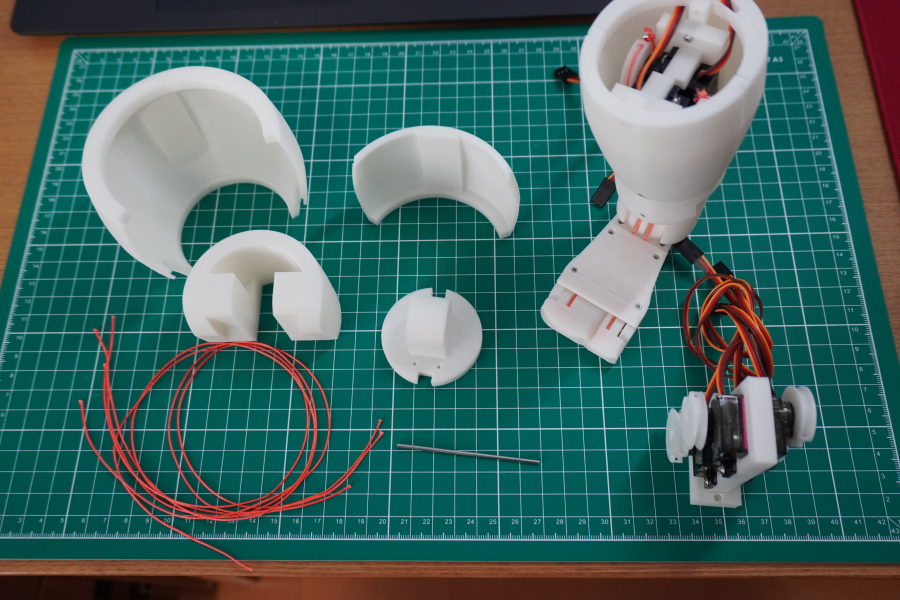
3Dプリンタでの印刷も完了したので組み立てていきたいと思います。
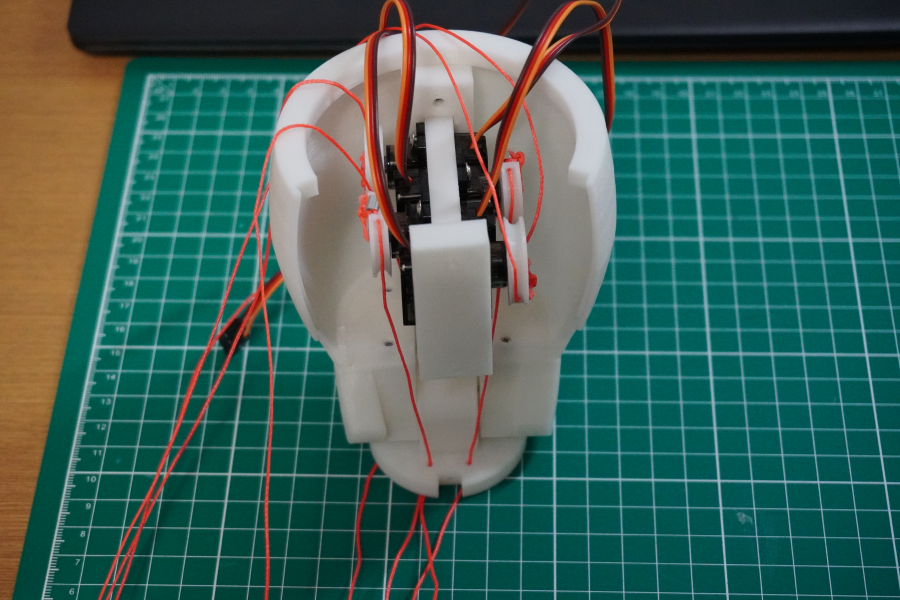
今回は、組み立て時に一番苦労するマイクロサーボモータは、事前にプーリを付け、モータベッドに取り付けています。太腿に取り付けるサーボモータは、膝駆動用の2台と股関節駆動用の2台を装着します。それを以下のイメージのように配置して太腿の前側カバーに取り付けます。
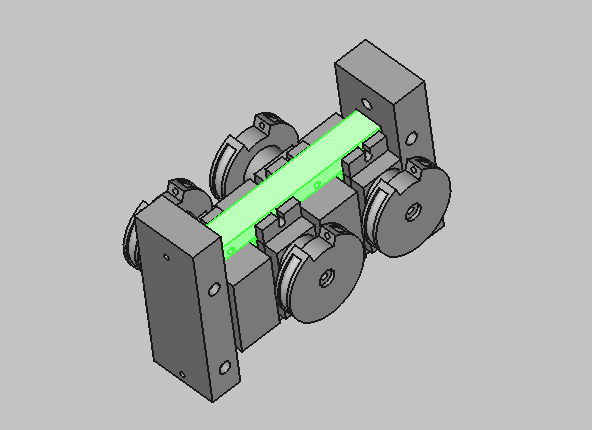
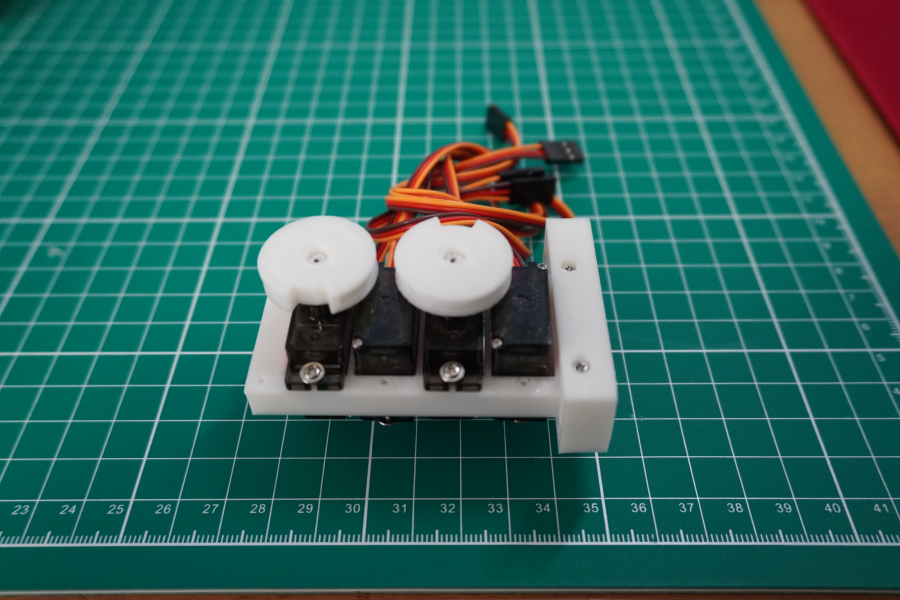
今までは、上位の体の部位に装着(足首は膝下、膝は太腿に装着)していましたが、太腿駆動用のサーボモータを太腿に装着することにしています。少し不安要素になりますが、足の付根にも複数の駆動系が存在しますので、今回はこの配置で組み立ててみたいと思います。
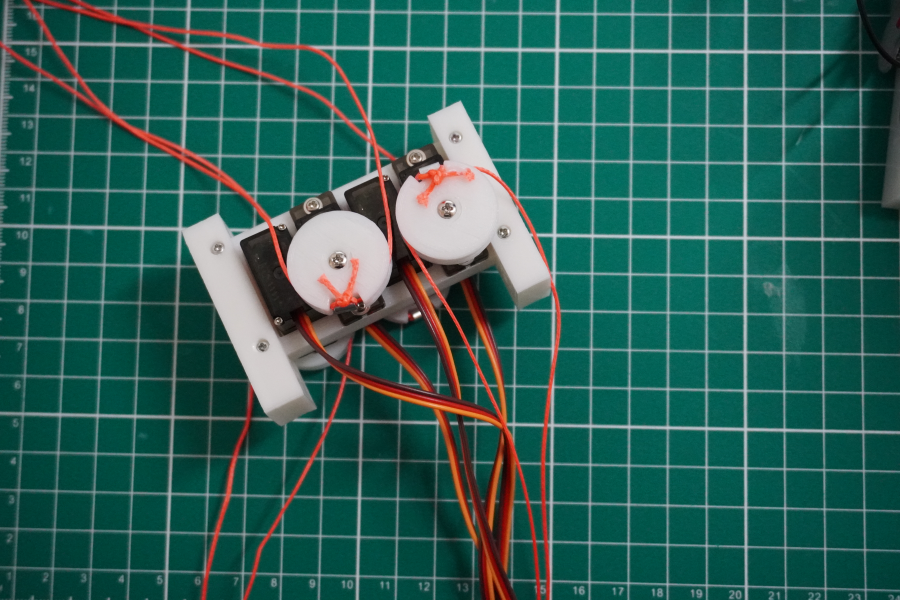
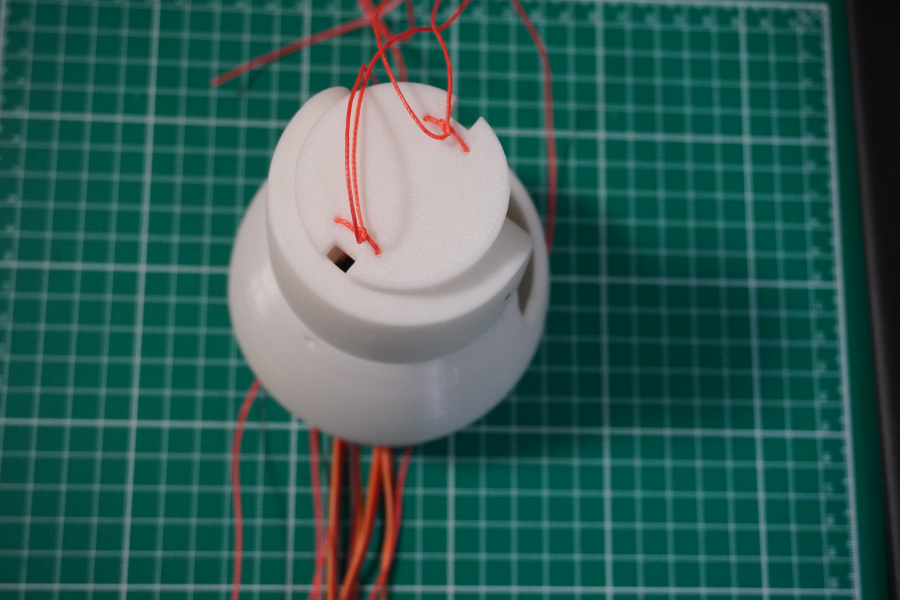
マイクロサーボモータのプーリに釣り糸をセットします。
サーボモータベットを太腿に取り付けます。
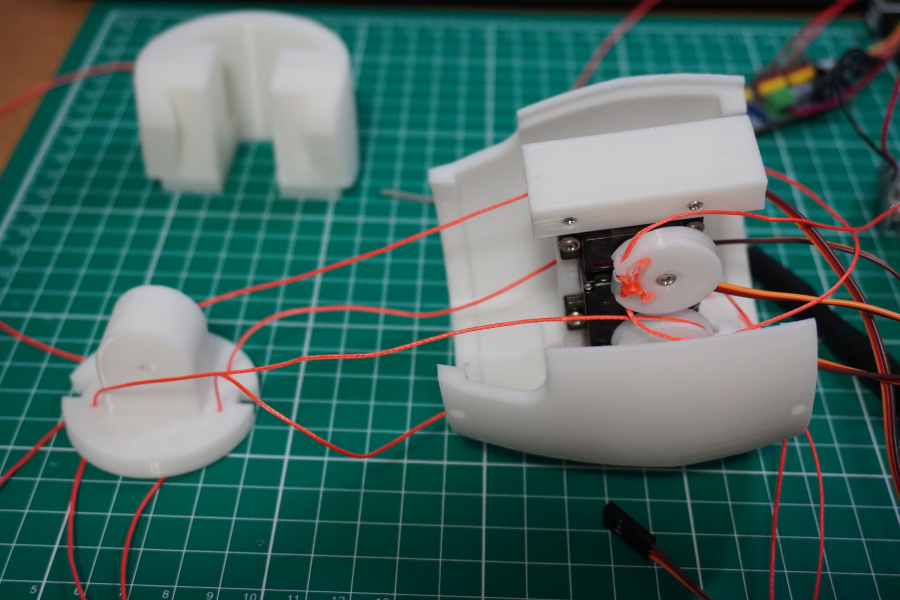
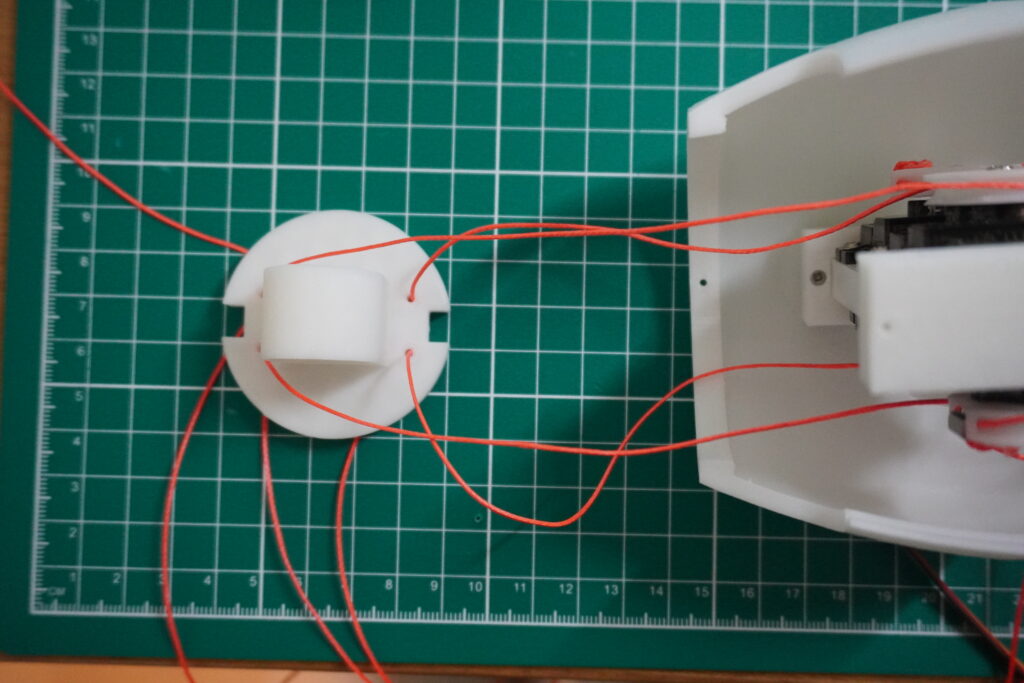
膝駆動用の釣り糸を膝の駆動部品に通します。
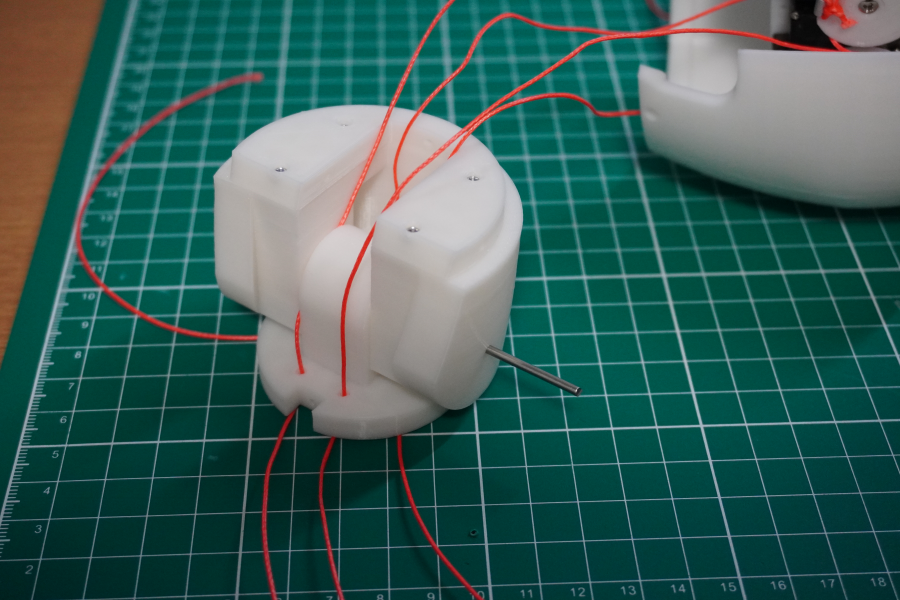
釣り糸を通した部品を膝に取り付けます。膝の駆動は、2mmのステンレス棒で回転させます。
さらに膝を太腿に取り付けます。
太腿の裏側を取り付けます。
膝駆動用の釣り糸を結びます。(本当はこれは縦にむすべきだったかもしれません)

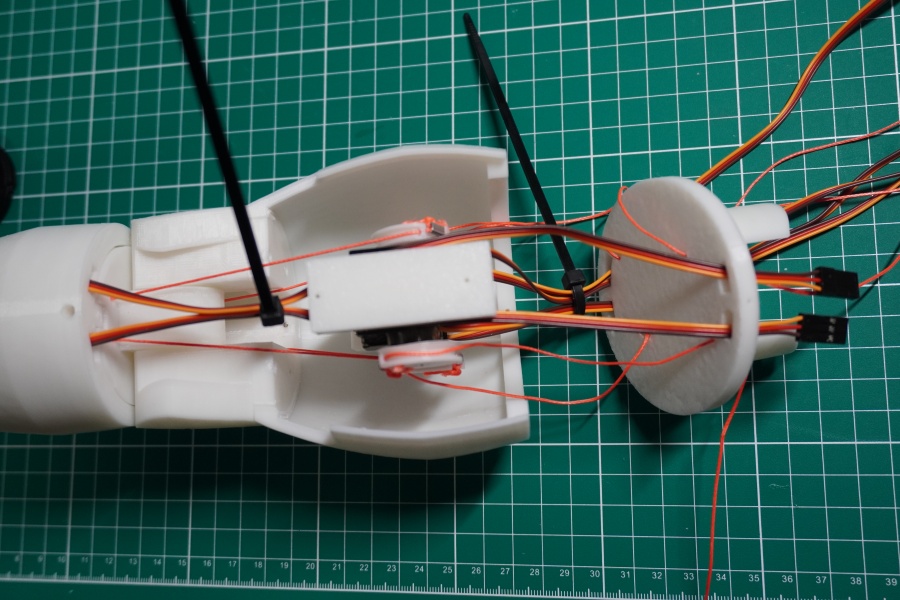
膝下を取り付けます。ここで足とのアンバランスに気が付きました。支えが無いと倒れてしまうのです。また、釣り糸とサーボモータのケーブルが絡まってしまい、駆動できそうにありません。そこで足の横幅を拡張、結束バンドを注文してリカバリを行います。
横幅を拡張して再作成した足だと、アンバランスなところがかなり改善されました。結束バンドも届いたのでサーボモータのケーブルを括ります。
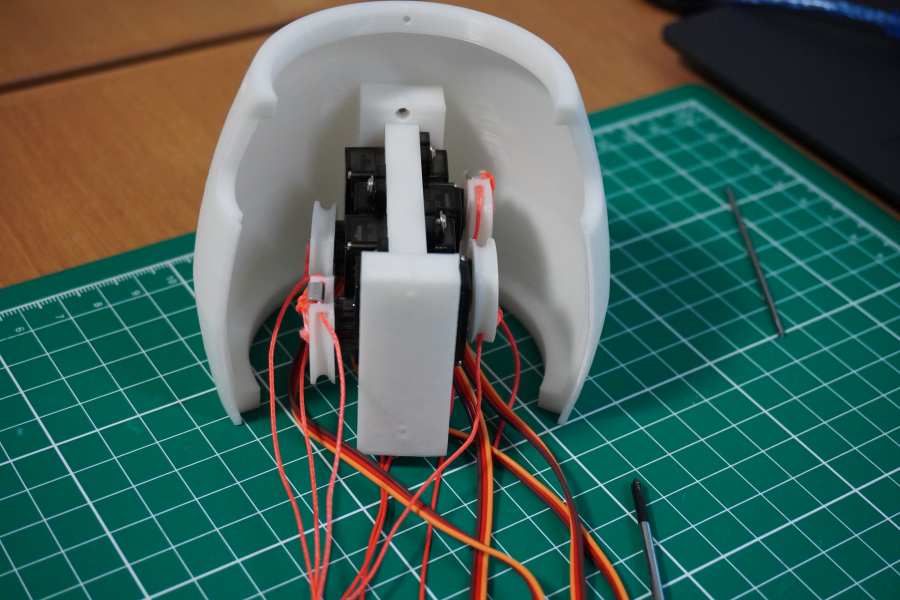
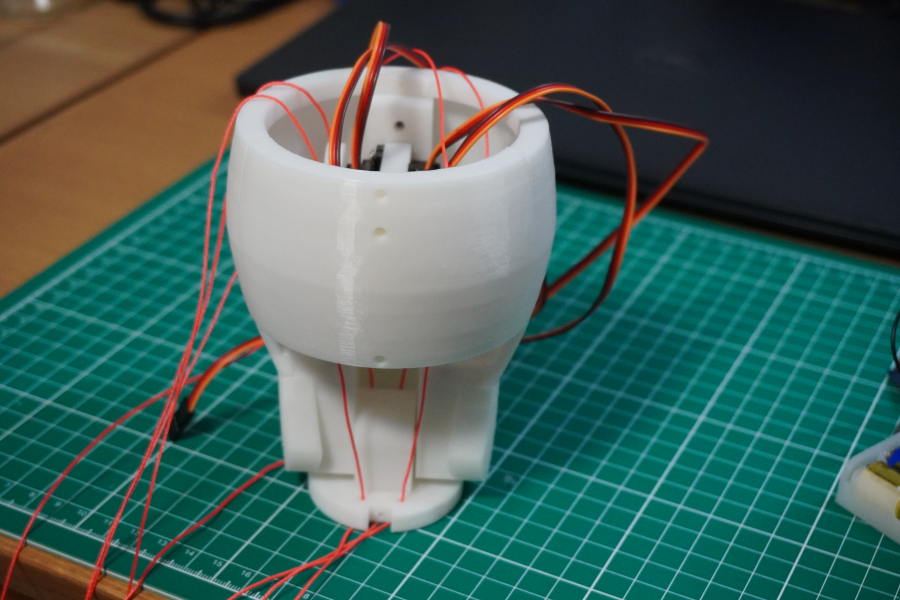
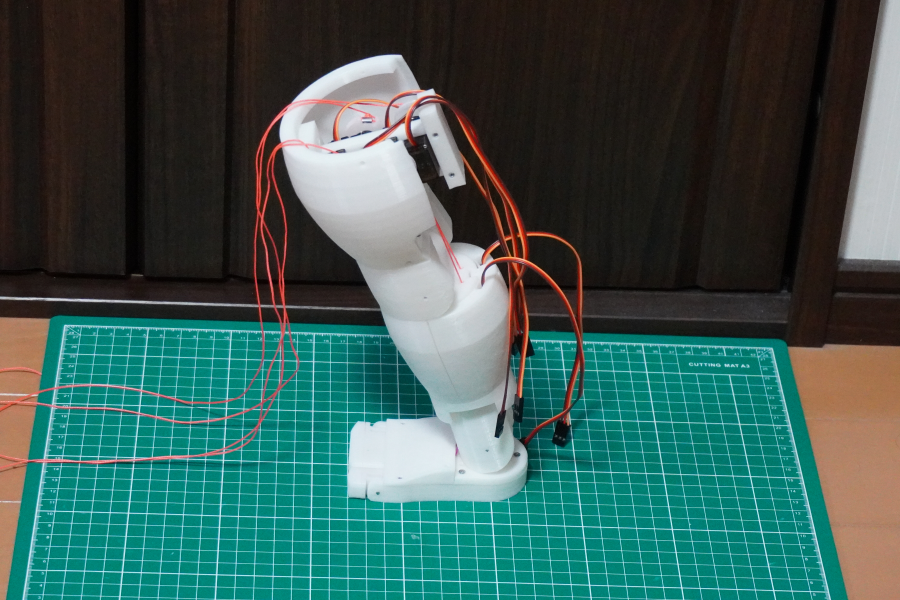
右脚が完成しました。
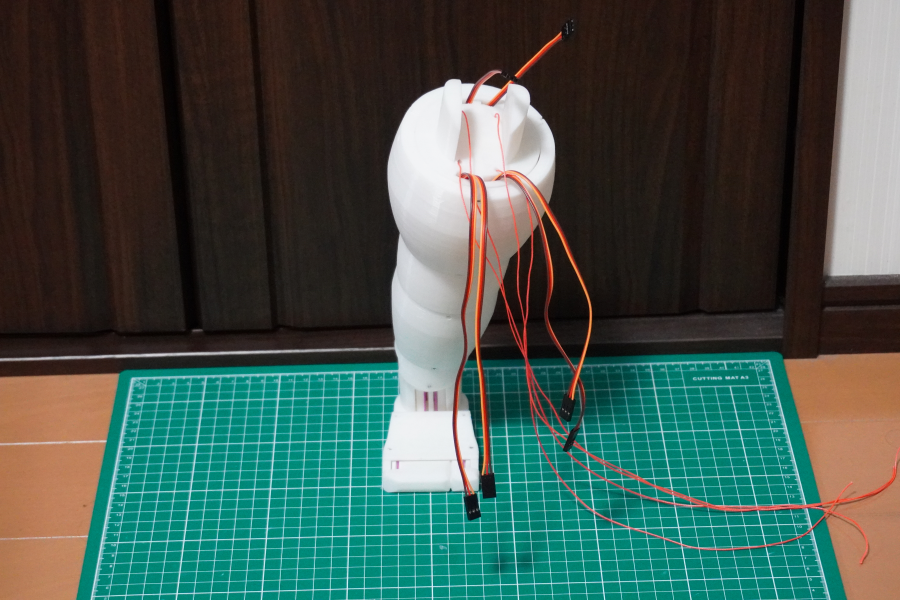
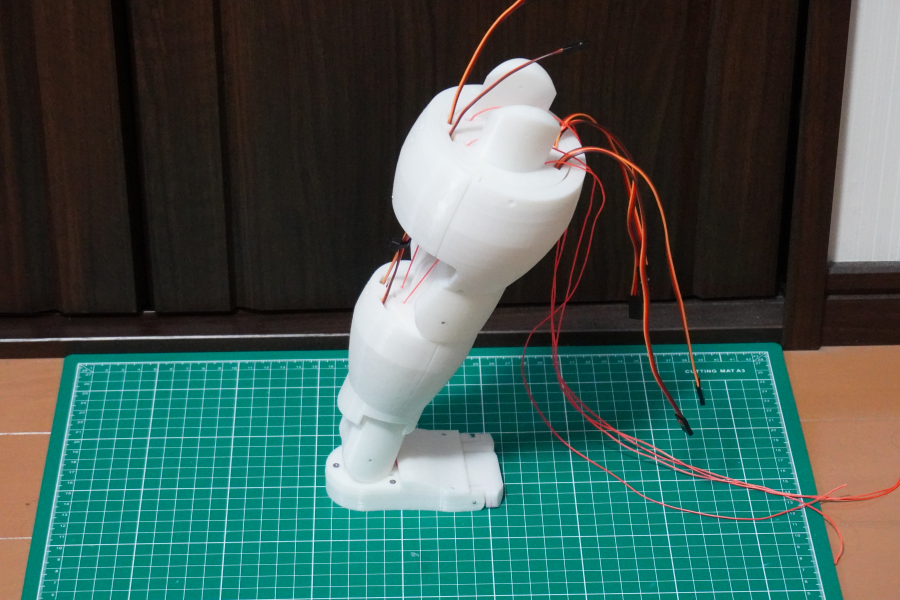
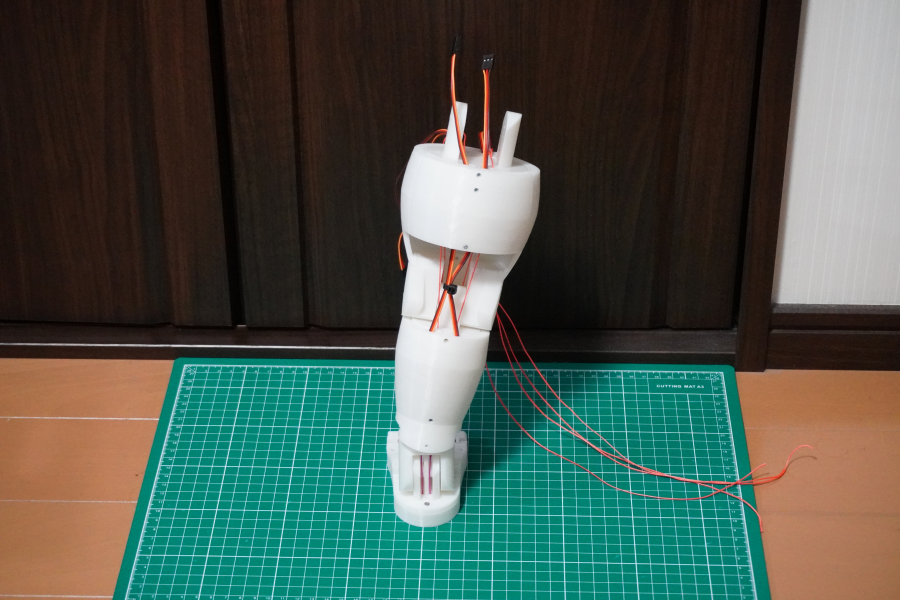
ヒューマノイドロボットの右脚になってきたと思います。現時点では、太腿の裏は大きく開けています。後の改善で太もも裏は、もう少し閉じたいと思います。
右脚を動かしてみる
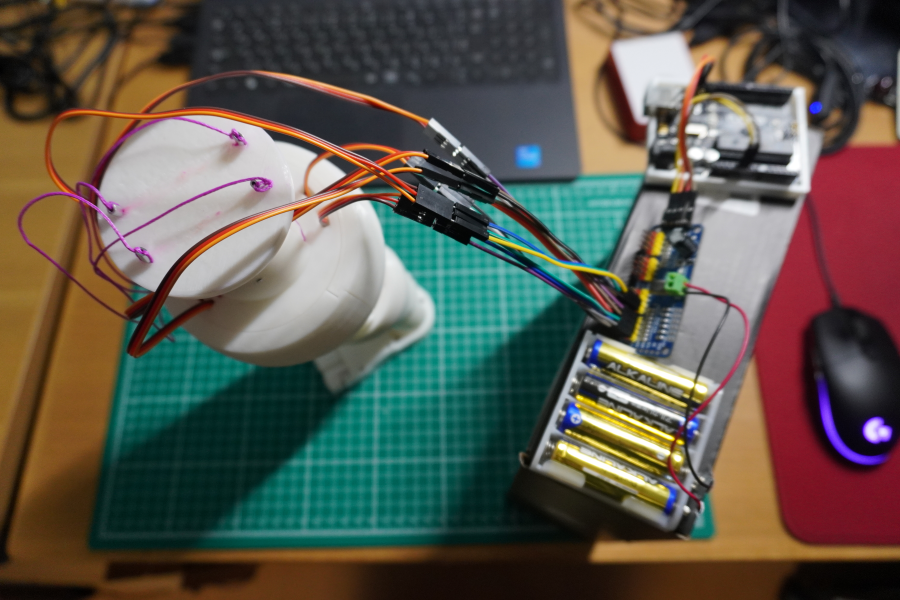
股関節を取り付けて実際に動かしてみようと思います・・・
と思って仮の股関節を取り付けて動かそうとしたら動きません。動かすために必要なトルクも大きく駆動力を伝えることがなかなか難しかったため、何度もやり直して、以下の形に納まりました。
この続きは
一旦、右脚は完成しましたが、今後、仮では本股関節や基板類を止める部品などを作る予定です。そして左脚も制作し歩くことが出来るのか試したいと思います。今の段階では、やはり小型でトルクの強いサーボモータ、テンションを保ちつつ釣り糸を固定できる例えばバネを備えたワイヤーロックなどがあれば、もっとスムーズに駆動するのではないかと思うので引き続き探してみる or 作ってみたいと思います。
以上


コメント