
今回は、箸休め会です。徒然な内容で、文字多めですが、良かったら読んでみてください。このブログを立ち上げた経緯などを書いています。
唐突に「ロボットをつくってみる」ってなに?
私は、関西在住のシステムエンジニアで3人兄妹の親父です。平日は会社に出勤してごく平凡な生活を過ごしています。何か環境の変化があったからという理由での「ロボットをつくってみる」ではありません。ただ、日々の仕事の中でもRPAやAIなどのちょっと硬い頭ではついていけない話題が出てくるようになってきています。自分で考えて、手と頭を使って、クライアントに依頼されたものを確実にシステムとして設計・開発すれば良いではないか?という思いが自身の大半を支配している反面、新しいテクノロジーを知らないまま漫然と過ごして良いのか?という疑問をもやもやと抱えていました。知ってからどう利用するか、利用できるか、はたまた使えないかを判断すべきではないかという思いに至った次第です。現在、盛り上がりを見せているAIなどの最先端のテクノロジーをどうやったら知ることが出来るのか?単に知識として知るというのではなく、実際に使ってみて「知る」に至りたいと思いました。また、使うといっても、PCのディスプレイ上だけではなく、成果がハード的に肉眼で見えるものを思考した結果、ロボットに至りました。
実は唐突ではありません。学生時代にメカトロニクス研究室に在籍していましたので、その昔は自分でも仲間と一緒にロボットをつくっていました。元々、ソフトウェアもそうですが、モノをつくるということは、大好きな性分で実際に動くものを作るというのは、ワクワクがとまりません。自分ならどういったロボットが作れるのだろう、今なら、具体的につくってみることも不可能ではないのでは?と思い始め、その後は、またもや持病のワクワクが止まらない症候群が発症し、自分でつくってみようという方向性に一気に向かってしまいました。まだ、先は長そうですが、自分で学習し動ける(いわゆるAI搭載)ロボットをつくることも可能なのでは?と想像を膨らませて、まずは、人間的に動けるロボットをつくってみようということで、右手試作を繰り返しながら、本ブログを立ち上げツイッターを始めたのです。(今更?ですよね。実は、SNSもスマホも全然使いこなせていません。時代の波には、何週も遅れている気がします。少しでも追いつけるように日々精進しようとしています。)
3Dプリンタって夢の道具、それとも愛玩的なおもちゃ?
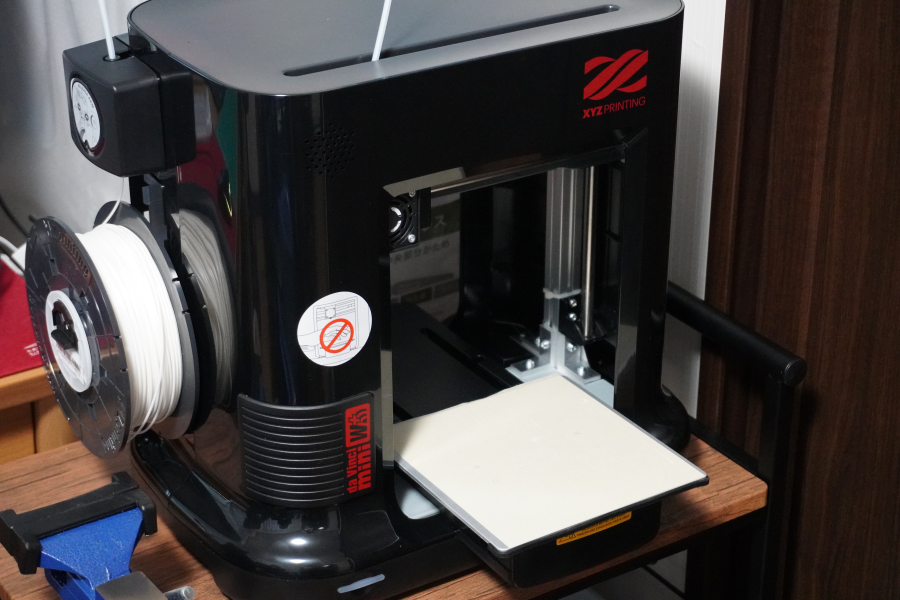
ここまで、3Dプリンタの初号機は、「XYZ da vinci mini w+」、今のメインは、2号機の「QIDI TECH X-MAXⅡ」を使ってきています。ロボットをつくるには、造形能力を手に入れないと無理だということで、安易に購入してみたのですが、思ったほど夢の道具ではないと気づかされました。(理由、印刷に結構時間がかかる、良く考えて設計しないと形にはならない、メンテナンスが欠かせない等…)

今まで使ってきた経験がなく、それなりの知見を持っていた訳でもない、いわゆる「初心者」なので、他のモノ同様に見た目と値段で判断して購入してしまいました。3Dプリンタは、家庭用といえども安い買い物とは言えないし、もっとスペックや特徴などをよく調べて購入すべきでした。(反省)
初号機は、思ったように造形物が作れず、2号機入手直後にネットで売ってしまおうかとも思いましたが、結局、2台使いという分不相応な事をしています。どうしても「XYZ da vinci mini w+」は、価格帯が少し低いためか、精度が求められる造形では、失敗をする可能性が高いのです。しかし、何故かこの子にも何かプリントさせようとしてしまいます。(フィラメントが余っているからという理由もありますが…)。その理由は、印刷時にビートを刻むからです。何分か印刷を始めると昔のゲーム音のようなリズミカルな音を発し始めます。また、分解するのではないかと思うほどガチャガチャ音を発します。いくら愛着が沸いても動くロボットの作るための精密さが求められるキー部品は、作れそうにはありませんでした。そこでAmazonの口コミを見て、そこそこ評判が良さそうな、2号機の「QIDI TECH X-MAX」を購入しました。初号機の購入から2ヵ月後です。
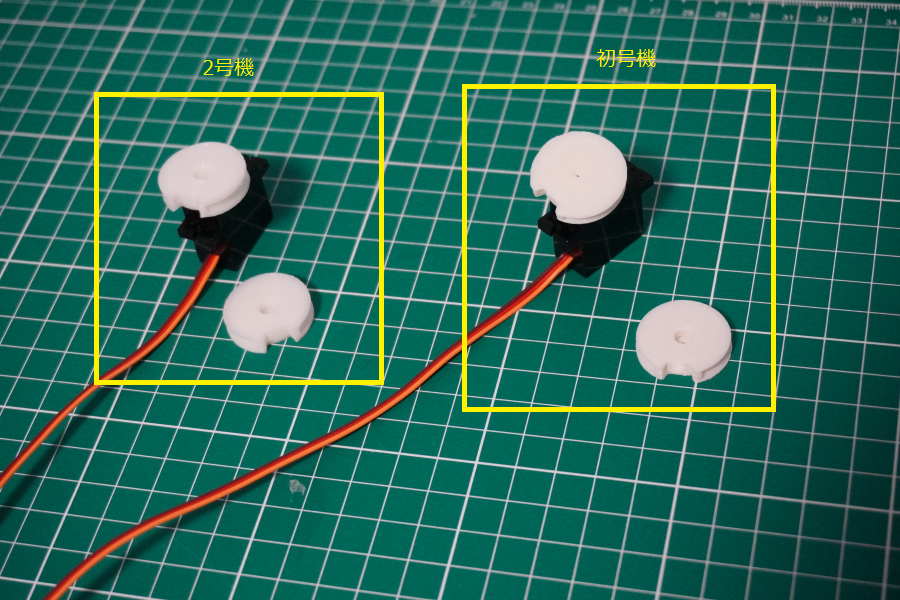
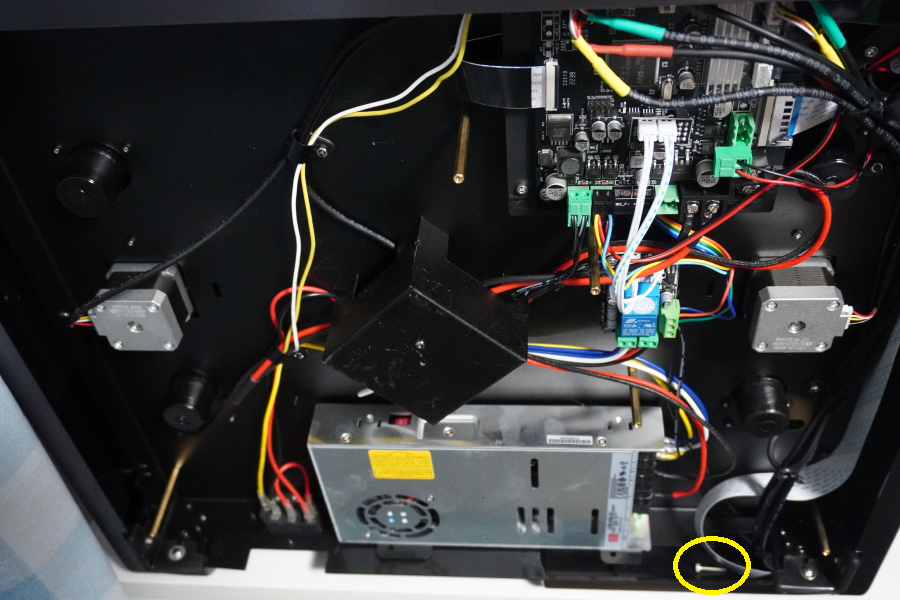
2号機を投入したことで「InMoov」の右手やオリジナルの右脚などの制作にやっと進むことが出来始めました。2号機は、いつでも優等生かというとそんなことはありません。注文は「QIDI TECH X-MAX」だったのですが、配送されてきて箱を開けたらロゴが少し違っており「QIDI TECH X-MAXⅡ」となっていました。セットアップ時点から付属のマニュアルと少しずつ異なります。まぁ、Ⅱの方が新しいだろうし、多少、改良されているのだろうと思って、むしろ良い事だろうと受け止めていました。しかし、暫く使っていると、フィラメントが詰まるようになり、エクストルーダの交換、フィラメントの変更、メインボードの交換と結構、やんちゃです。また、時々、イラッとすることがあります。それは、隙間が多く、ビルドプレートから取ろうとした造形物が、ピュンっと弾いてしまうと、こんな隙間に入るか?というところに入ってしまいます。メンテナンス等でネジを外して落としてしまうと、結構な確率でネジが隙間に落ちてしまいます。結構「あるある」なのかもしれませんね。
そんな手のかかる3Dプリンタ達ですが、メンテナンスをして使っていくうちに、愛着が沸いてきて、ロボット部品を作る大切な相棒になりつつあります。
どこへ向かうつもりなの?
今は、出来るだけスムーズで自然な動作ができるロボットを試行錯誤しながら作ろうとしています。体の部分は、中途半端な動作ができる右手と右足の試作をしただけの状態ですが、まずは動作を安定させて他の部分も作っていく予定です。また、制御ボードのArduinoをセンサーやモータと繋ぎロボットの動きを実現していくわけですが、今は、簡単な動作ができるのみですが、もっと使いこなせるようにArduinoプログラミングも学習中です。今の構成としては、ArduinoとWindowsPCを繋いで制御プログラムをコンパイル、USBを繋いでアップロードしています。しかし動きが発達するとその構成のままでは、ロボットを自由には動かせない状況になってくる想定です。そこでPC自体をロボットに積んでしまおうという計画です。
既にロボットにも搭載できそうな大きさのPC「Raspberry PI 4B」は手に入れています。まだ、開封しただけですが、今後は、こちらでArduinoの制御をしていこうとしています。最終的には「Raspberry PI 4B」にAIを搭載して、自動プログラミングとアップロードができる構成を目指しています。そこに行きつくためには大容量バッテリーの調達も必要不可欠ですね。

その先には、自分で考えて動く、出来ればゴルフやバスケなどスポーツが出来るレベルまでを目指したいと思っています。まだまだ、やることが沢山あり、時間がかかりそうですが、コツコツとスキル習得とロボット部品の作成をやっていって必ずやゴールに達成したいと思っています。
以上


コメント