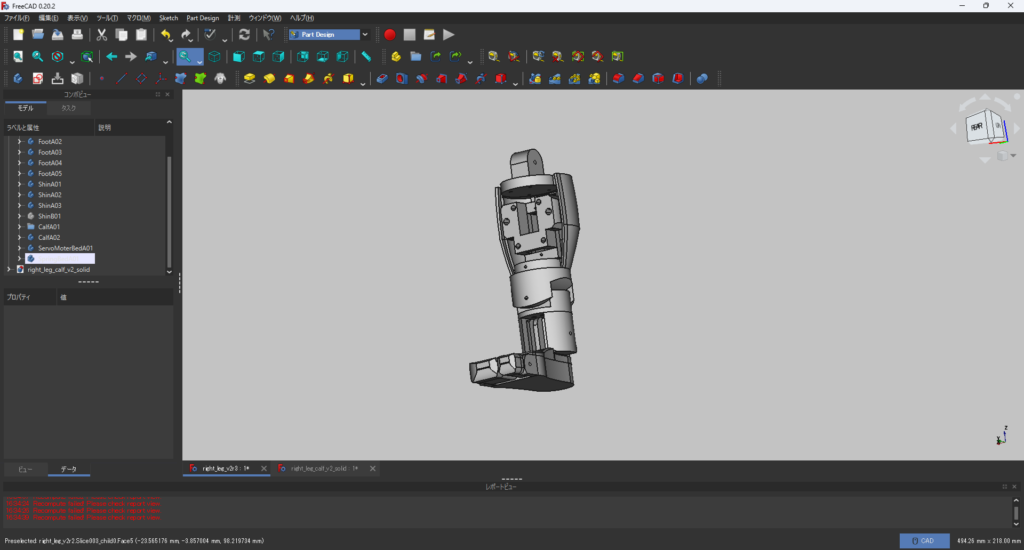
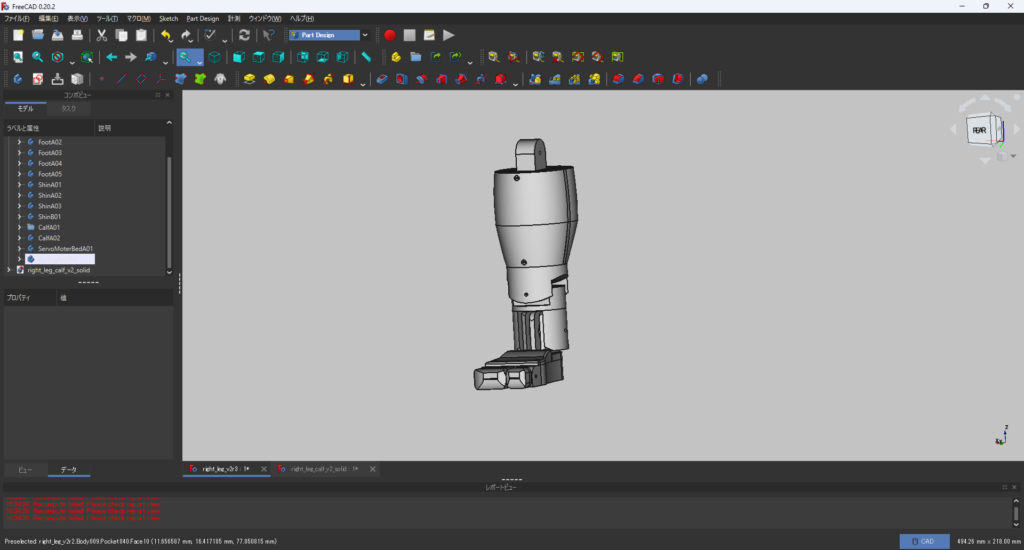
右脚の組み立て
3Dプリンタの修理も完了し、設計も出来ているので早速、右脚を作ってみたいと思います。今回は、等身大の1/4スケールということもあり、サーボモータの配置スペースが非常に狭いため、マイクロサーボ1台で足首を動かしてみたいと思います。
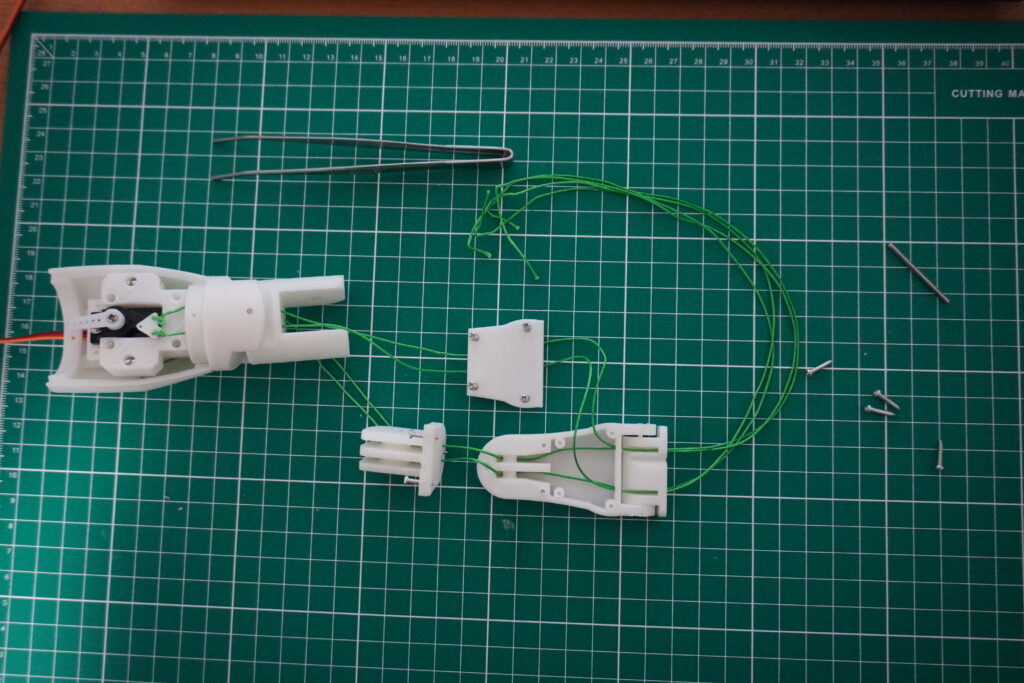
右足の組み立て
まずは、つま先からかかとまでの部分を組み立てていきます。通常、等身大であれば足の指は5本ありますが、ミニチュア版ということで足の指は、親指とそれ以外の指という形で2本でつくりました。それに合わせて、駆動させるワイヤーも曲げるのに2本、伸ばすのに2本を使うことにしました。
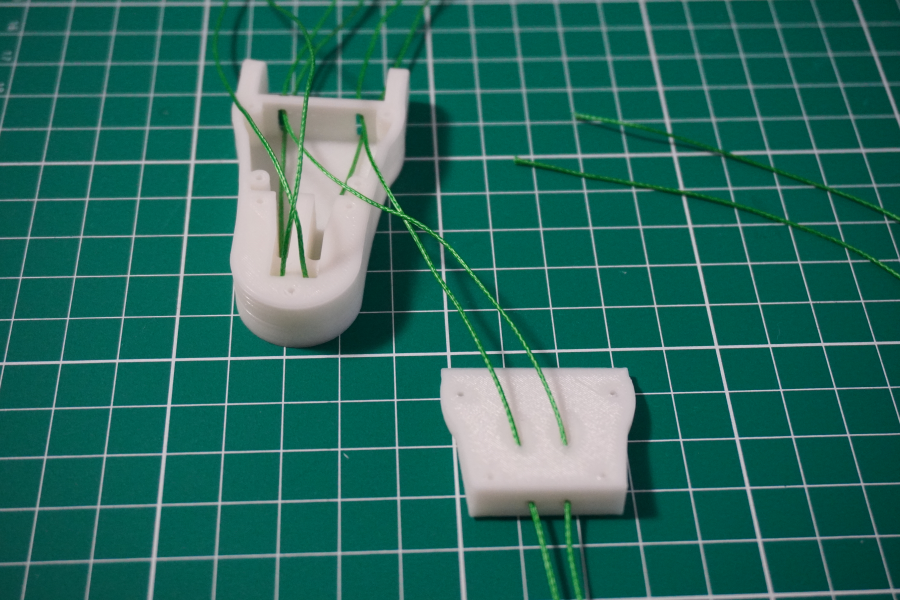
足の甲は、斜めの穴を作成してその中にワイヤーを通します。つま先は、2mmのアルミワイヤーを通して回転できるようにします。

次は足首まで取り付け済ですが、足首取り付け後の写真を撮り忘れました。
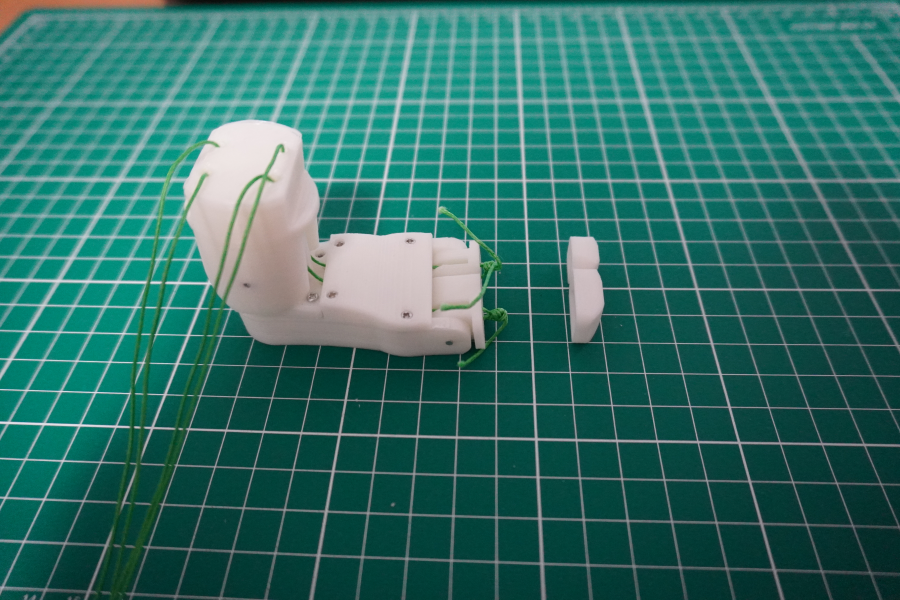
すねとふくらはぎの組み立て
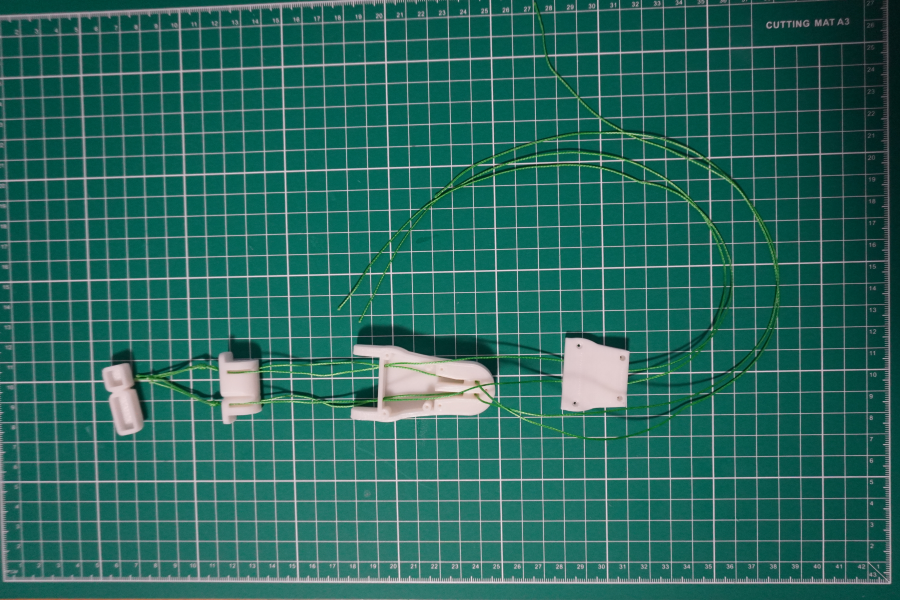
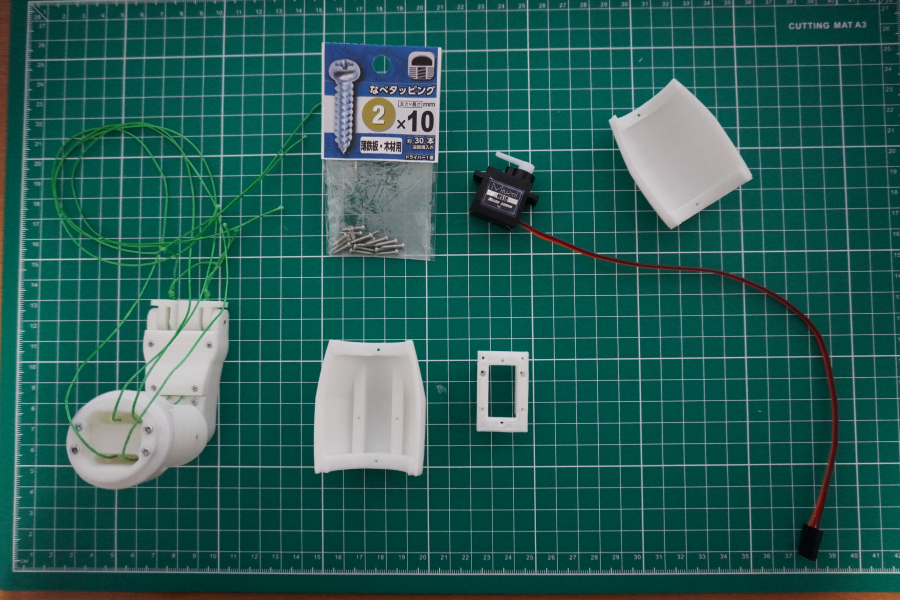
次はすねとふくらはぎを組み立てます。動力はマイクロサーボモータと引きバネを使おうと思います。基本的には、部品間の取り付けは、2mmx10mmのタッピングネジを使って取り付けています。
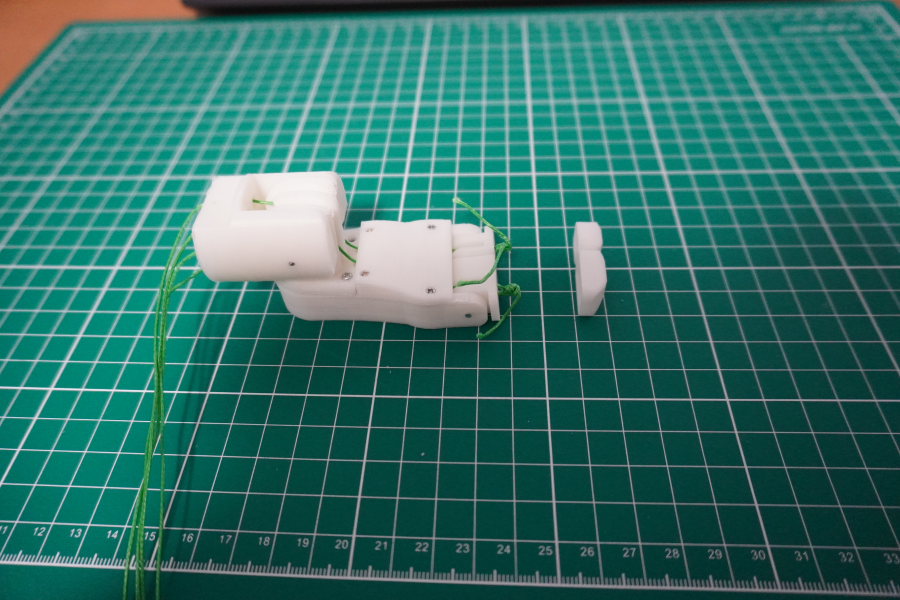
実は、ここまで来て上手くワイヤーを繋げません。致命的だったのは、バネに取り付けたワイヤー(釣り糸)が解けてしまったことです。何とかリカバリを試みましたが、上手くいかず、一旦、ワイヤーを通す箇所を分解して、再度、モータ側からワイヤーを通しなおしました。
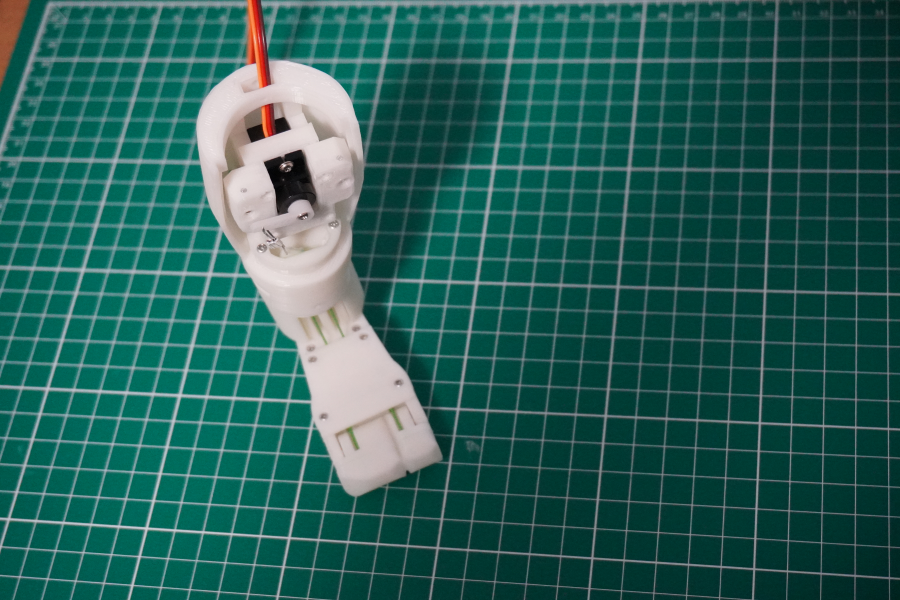

なんとか足首が動く状態まで組み立てすることができました。
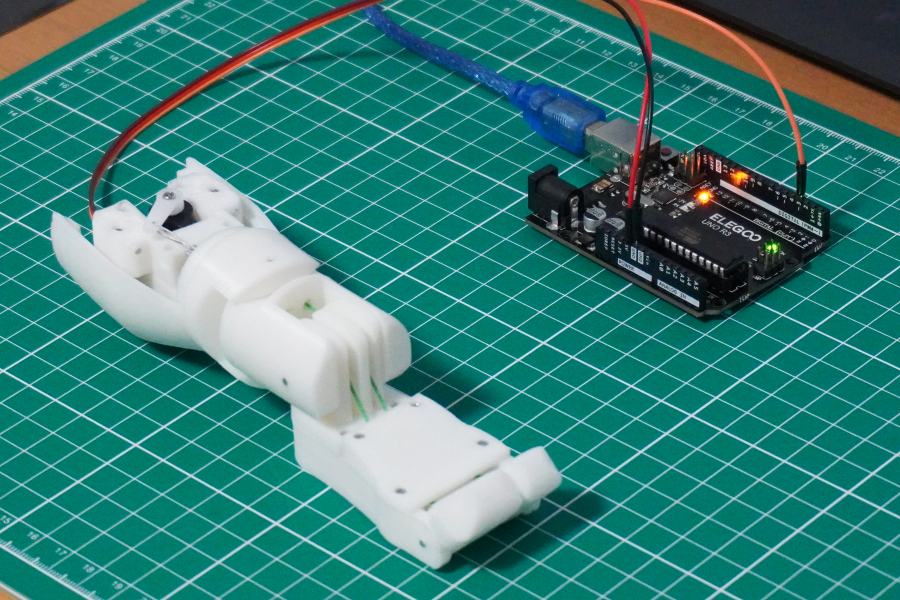
右脚(膝下)を動かしてみる
組み立て(仮)が完了したので、Arduino UNO 繋いで動かしてみます。
今後の改良について
まず、金属製のワイヤーを使った部分はどうしても硬くなり、動きがスムーズにはなりませんでした。また、引きバネのパワーは、ロボットをジャンプさせる程のエネルギーにはならず、せいぜい床をたたく音が少し大きいくらいでした。やはり本当に動く形にもっていくには、プーリータイプで引きも戻しももう少し力がかかるものにしないとダメなようです。
初期作成なので反省点はあったものの動きそうな感触を得ることが出来てある程度の満足感がありました。
以上


コメント