 加工・組み立て
加工・組み立て ロボット制作⑫ 右脚をつくってみる
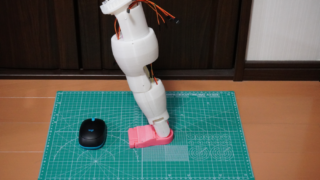
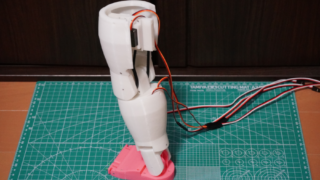
脚(膝下)をマイクロサーボに直接取り付けるサーボホーンを作って、タイミングベルトを使って動かしてみた。
どうやったらスムーズに動くのか暫く試行錯誤している右脚ですが、前回、動かしたときに安定感に欠けていたと感じたため、どうやったらしっかりと動く脚が作れるだろうかと色々と模索していました。まずは、ワイヤーでの駆動について、足首程度であれば問題は...