足首はワイヤー、膝と太ももはベルトで動かしてきましたが、これから股関節や腰などの重量級の関節についてはワイヤーやベルトでは、動かすことが難しくなってくると思います。そこでサーボモータの回転角度のリミッターを解除して無限回転にすること、サーボモータの維持トルクだけに依存したものではなく、重量級を安定して動かす駆動機構(アクチュエーター)を試してみたいと思います。
ウォームギアとは何者?
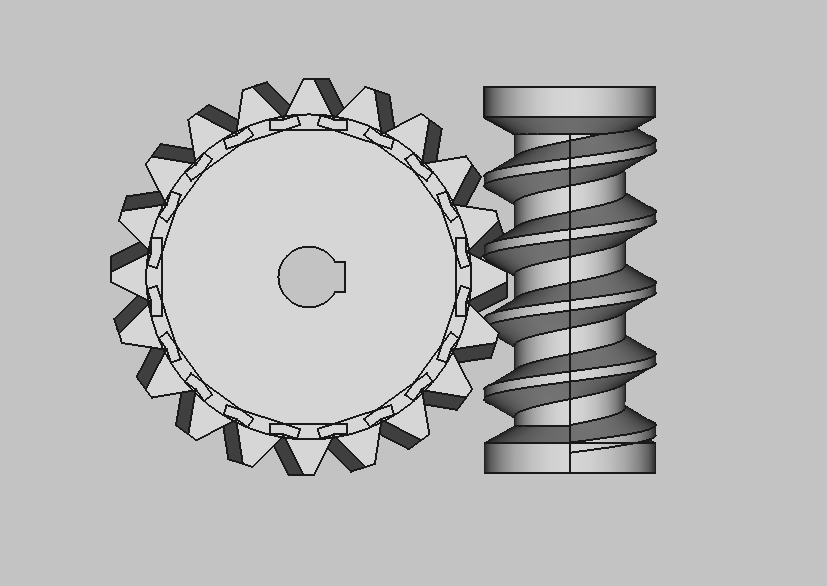
ウォームギアとは、ネジのような螺旋状の歯がついた円筒形の「ウォーム」とはずは歯車(斜歯)の「ウォームホイール」の2つが直角に嚙み合った構造の装置です。
ウォームギアのメリット
- 減速比が大きい
- 出力トルクが強い
- 動力の方向が変わる
- セルフロック現象が発生する
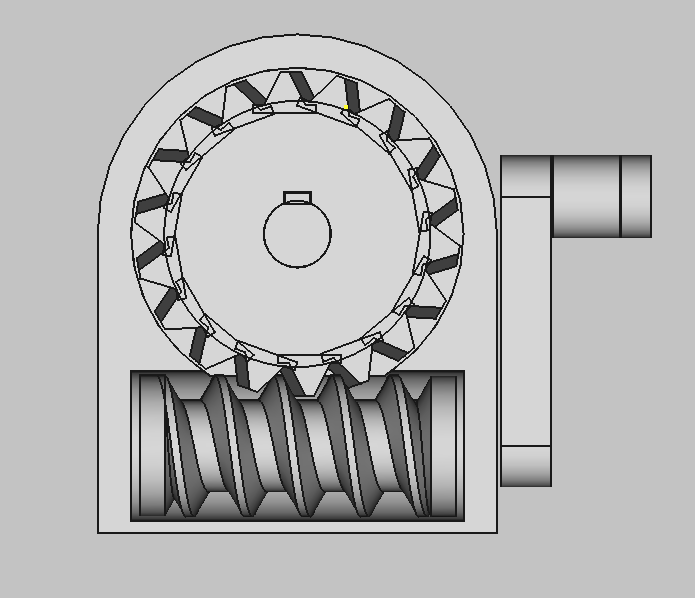
まずは、見様見真似でFreeCADで作ってみました。
ただし、この「ウォームギア」にもデメリットはあります。
1つは、動力の伝達が遅い事、もう1つは、摩擦抵抗が大きく摩擦熱や摩耗が発生しやすいことです。
どう頑張ってもワイヤーやベルトには駆動速度では適いませんが、重量級の関節の駆動には、速さよりも馬力を優先する必要があります。対象としているのは、脚を開く、腰を曲げるといった動作です。
ウォームギアを作ってみる
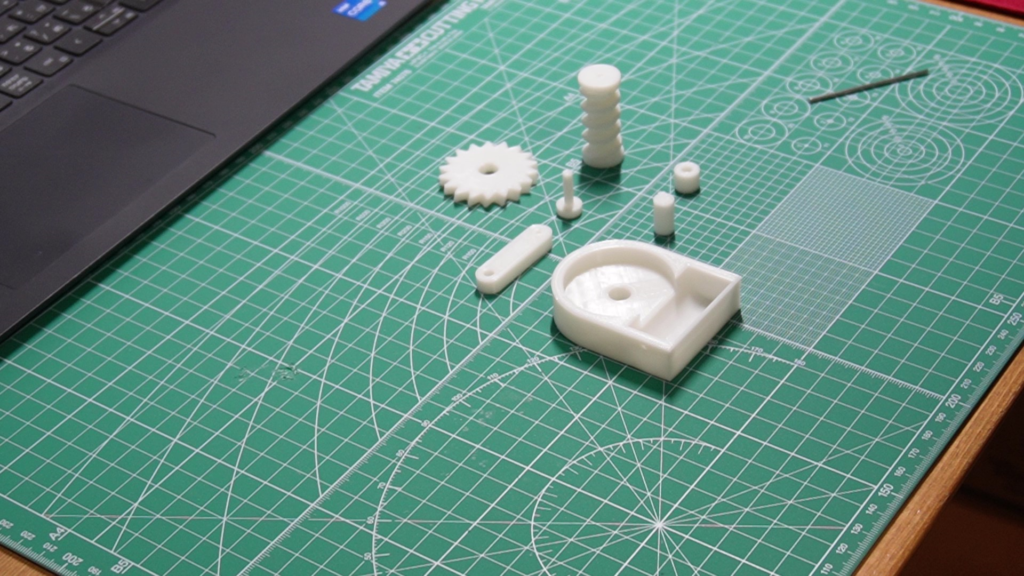
実際に設計データを元に印刷して手動で回すウォームギアを作ってみたいと思います。
以下のような部品を3Dプリンタで印刷して、組み立てました。
リンク
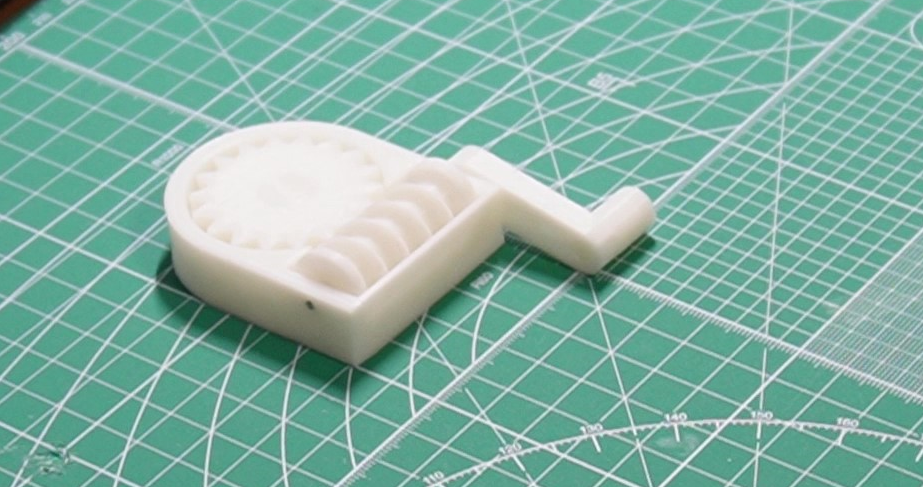
ウォームギアを組み立てて動かしてみる
今回の制作では、3Dプリンタの他の材料は、以下のフィラメントとステンレス棒を使用しました。フィラメントは、eSUNのものをリピートで使っています。
リンク
リンク
後編では、一部をカーボンフィラメントで作成し、サーボモータに取り付けて動かしてみたいと思います。
以上


コメント