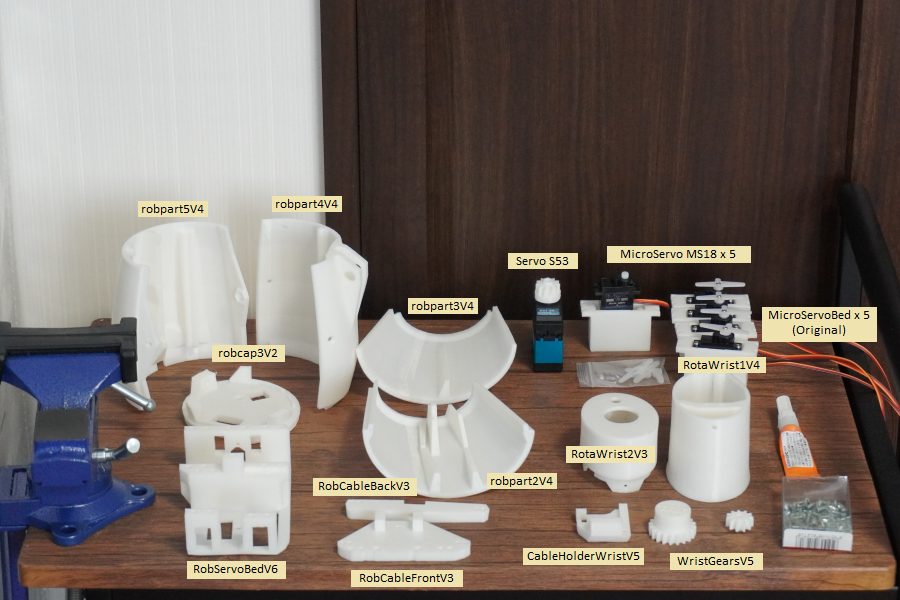
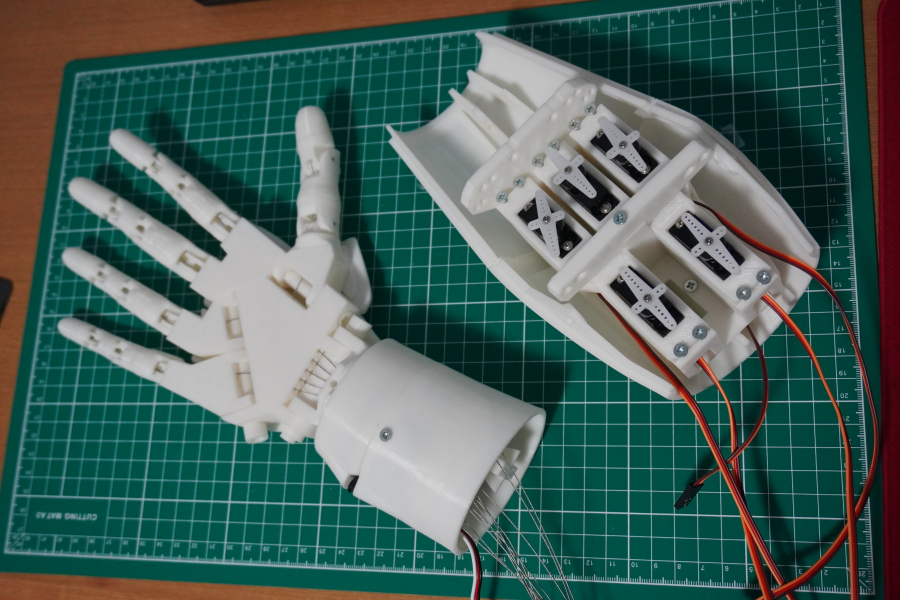
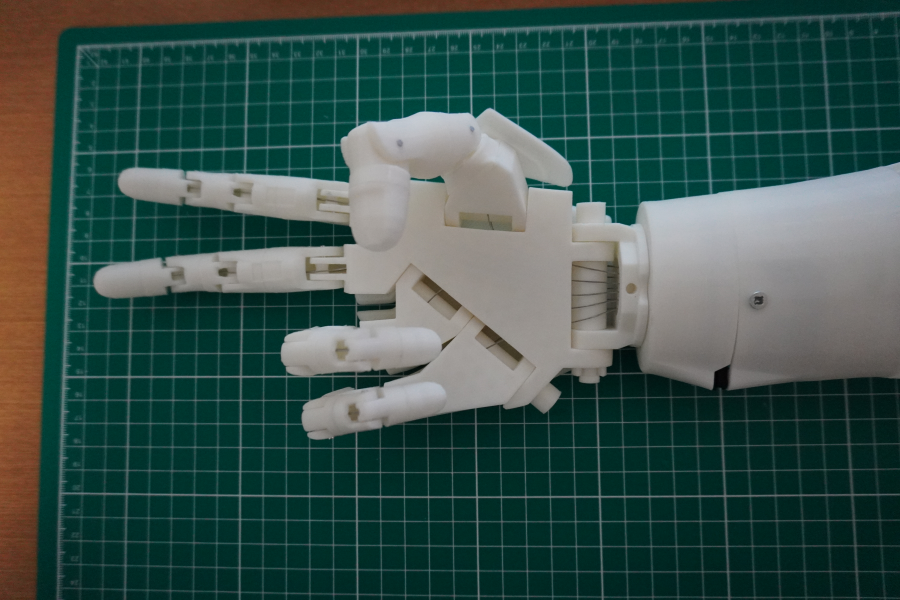
部品の準備
先日制作した右手を取り付ける右腕をつくってみようと思います。下の画像にある部品を3Dプリンタで印刷してサポート材の取り外し、ヤスリで磨きました。(ちゃんとはめ込むことが出来るように磨くには、結構時間がかかります。)
組み立て
プラスチック用の瞬間接着剤、3mm木ネジなどで部品を取り付けていきます。
まずは、右腕部分を組み立てます。中にはサーボモータを取り付けるサーボベットなどを取り付けます。

腕の手首側(robpart2V4)と肘側(robpart5V4)を接着剤でくっつけます。接合部分の曲がりが少しずれるとくっつくまでに強く固定する必要があります。
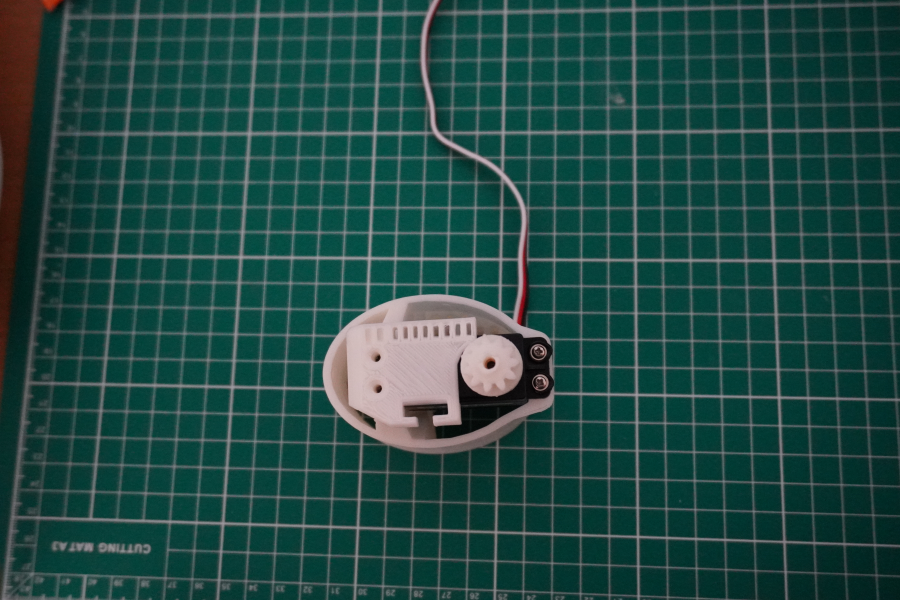
続けてサーボベットと腕(robpart5V4)を木ネジで取り付けます。その後、ケーブルを通す部品をサーボベットに取り付けます。(サーボを取り付けた後の方が正解でした。)
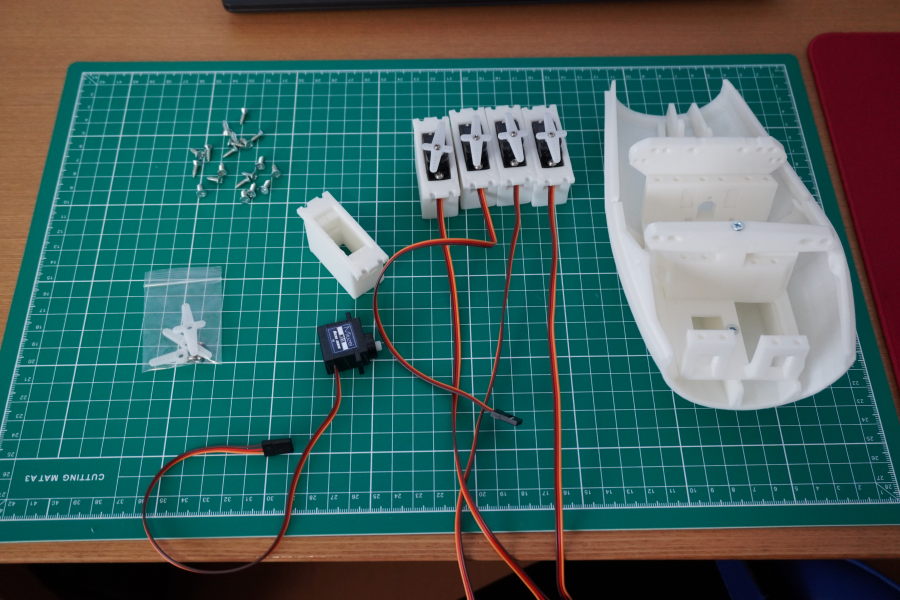
サーボベットにマイクロサーボモータを取り付けます。通常は、60度回転する通常サーボを取り付けるのですが、購入したのが180度回転するマイクロサーボだったためオリジナルの容器(マイクロサーボベット)を作りこれを腕のサーボベットに取り付けました。(設計通りに部品を用意しないと結構苦労します。マイクロサーボが安くてこちらを選択しましたが…)
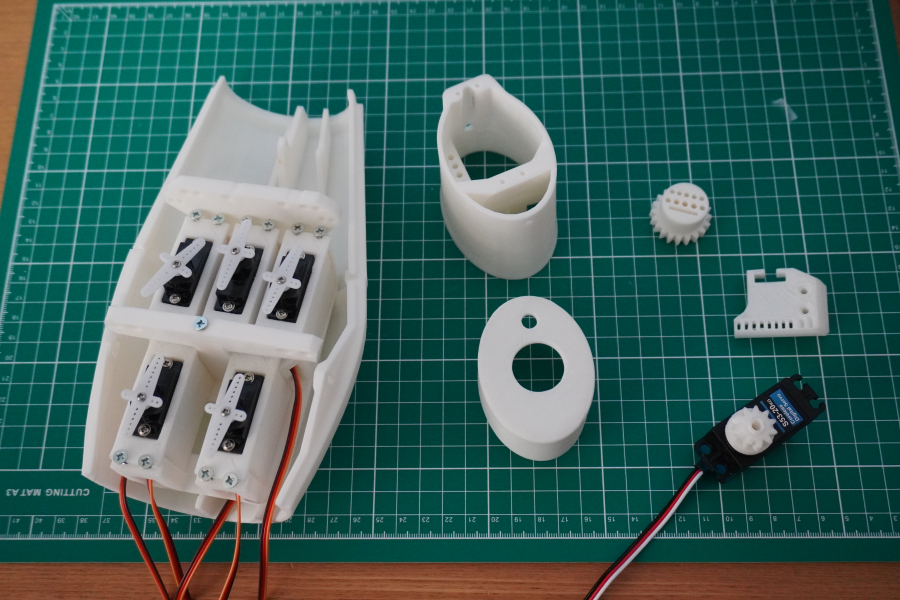
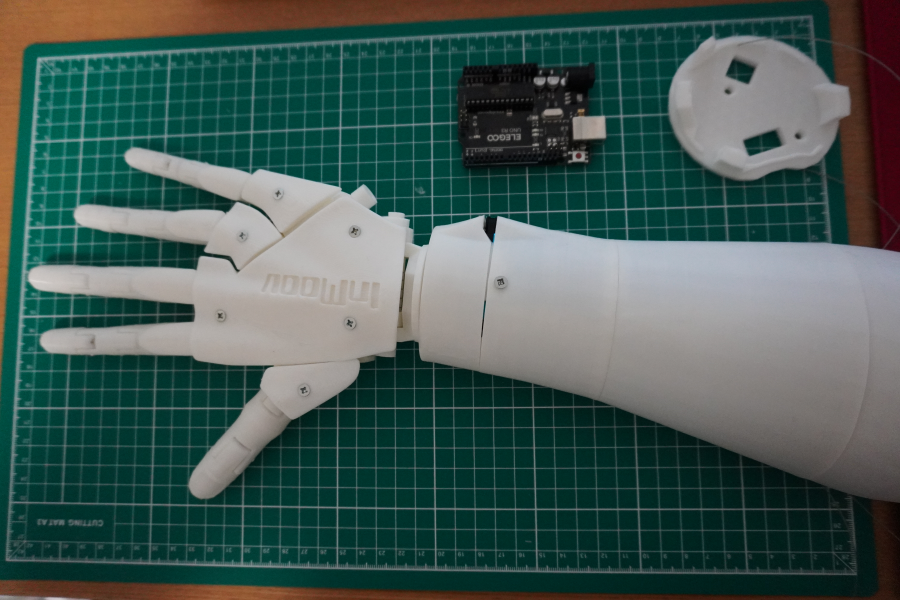
続けて右手と右腕を取り付けます。
手首を回転させるためのサーボモータを取り付けます。このサーボモータへギアを取り付けるのですが、寸法が合わず非常に苦労しました。通常、取り付けが難しい場合は、「はんだごて」を使って溶かしてから接合するようです。今回は、ヤスリで削って寸法を無理やり合わせました。
続けてサーボモータにケーブルホルダーを接着剤で取り付けます。
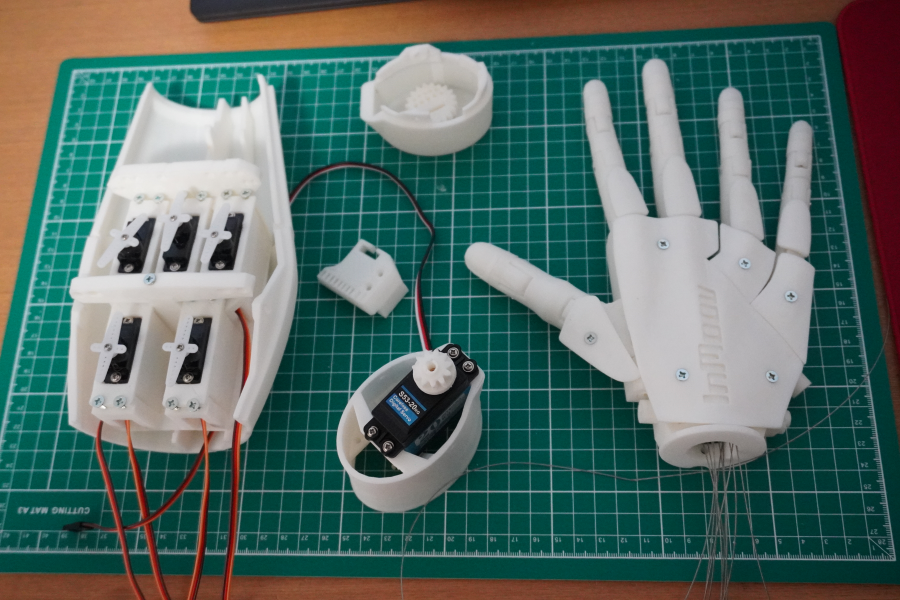
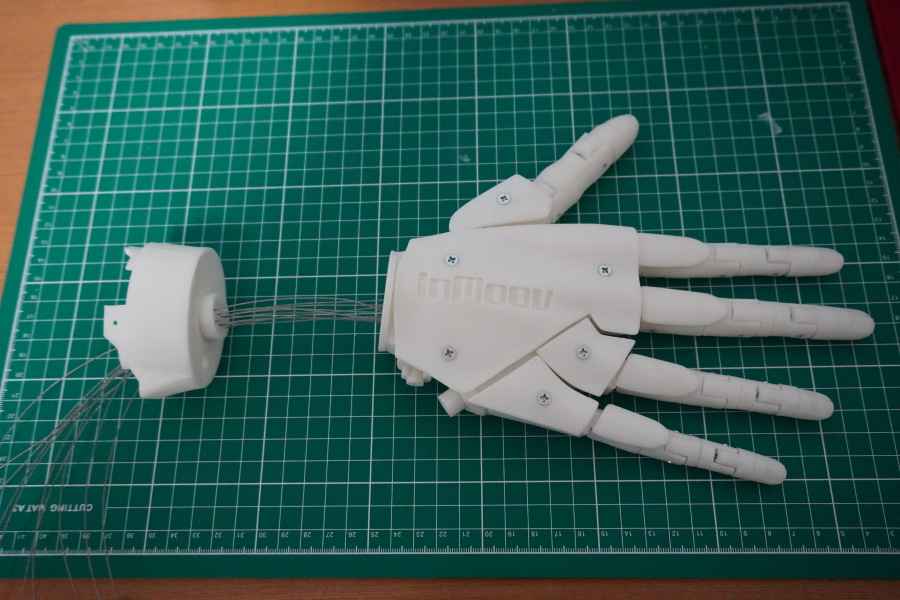
手首と手を取り付けます。この時、右手から出ているワイヤーを各部品の穴を通してくっつけます。結構、時間がかかり忍耐の必要な作業でした。
手首の接合部は、3mm木ネジで取り付けます。
続けて手首と腕を接着剤でくっつけます。こちらも固定しないと上手くくっつきません。
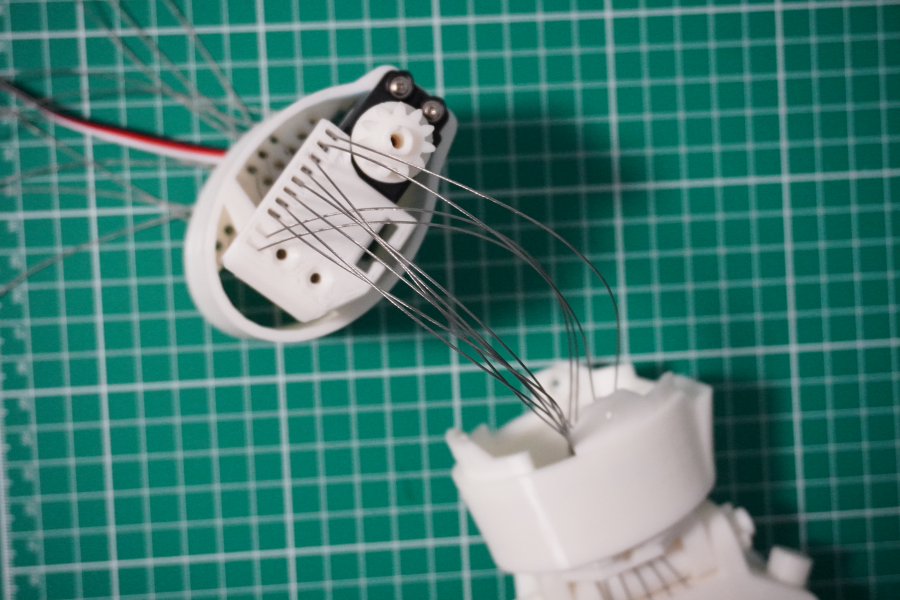
ワイヤーをマイクロサーボに取り付けます。取り付け部分は、留め具を使いました。(この片が元々の設計と違うので上手くいきませんでした。)
他の部品もありますが、閉じてしまうとまだサーボモータの調整などもあるため、今回はここまでで完成とします。
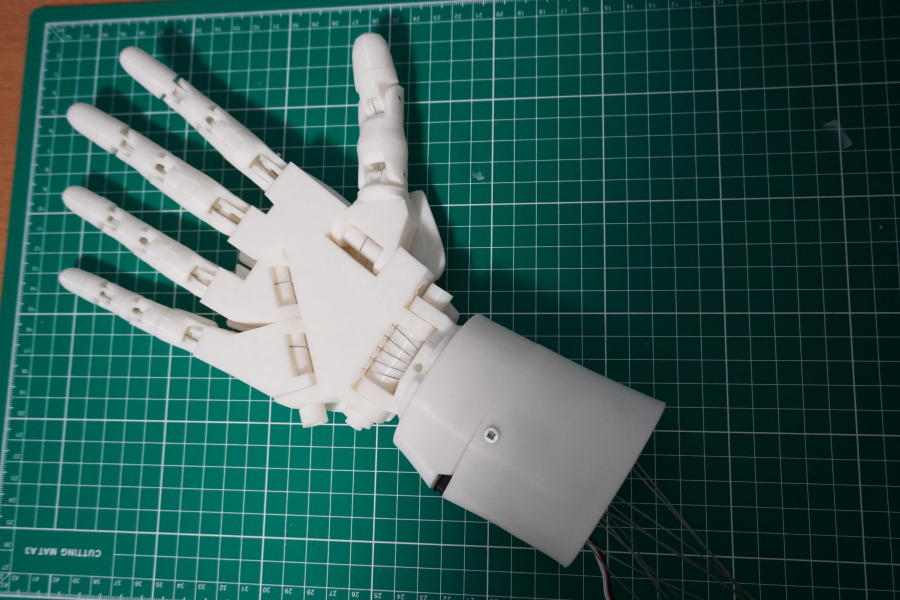
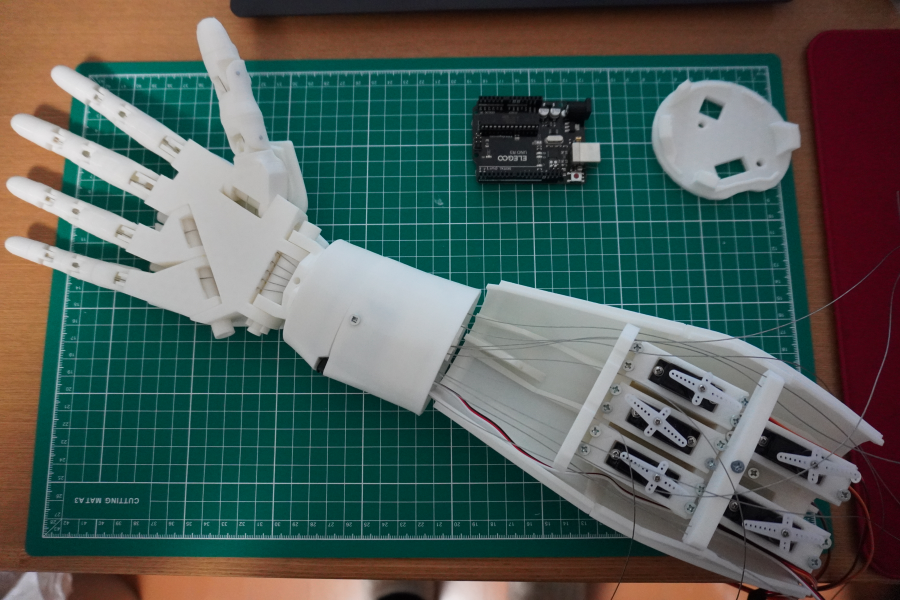
右腕が完成!
サーボモータまで取り付けが完了しました。が、元々の設計から異なる部品がかなりよくありませんでした。
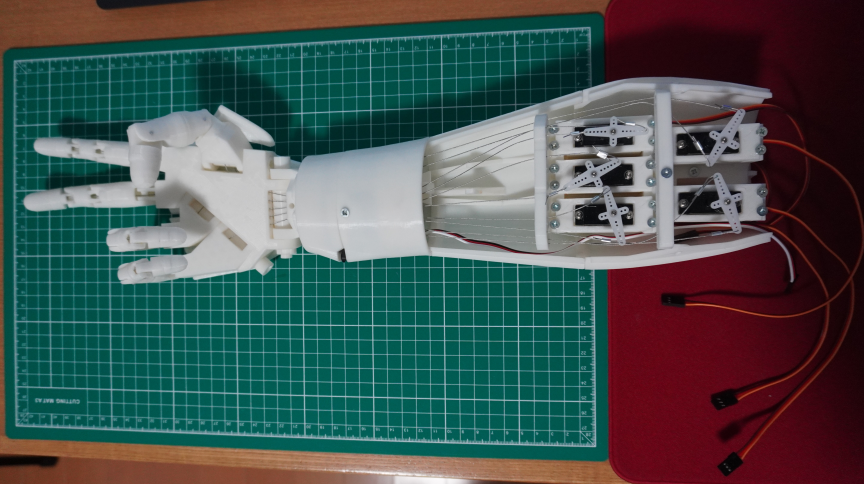
- 指を動かすワイヤーに釣り糸を使わずにステンレスワイヤーを使ってしまったこと
- モータに安価なマイクロサーボを使い、ワイヤーを取り付ける部品を使っていないこと
まずワイヤーの材料を変えてしまったのはかなり痛手でした。この右腕では何度もワイヤーが曲がっており、金属のワイヤーだと反発が大きく引っかかって硬くなってしまい、動かすためには結構な力が必要になってしまいました。マイクロサーボに付属の部品だとワイヤーを動かすリングの取り付けが出来ず回転させるとワイヤーや稼動部の部品がぶつかってしまう状態になってしまいました。
次は、一応、制御ボード(Arduino)を繋いでサーボモータを動かしてみたいと思います。それとは別に釣り糸と正しいサーボモータを手に入れて部品を組み立てしなおしたいと思います。
以上


コメント