 加工・組み立て
加工・組み立て ロボット制作⑬ 右脚の股関節をつくってみる
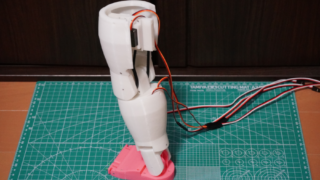
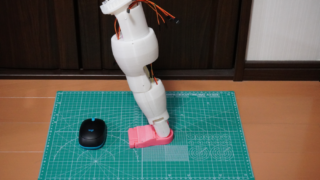
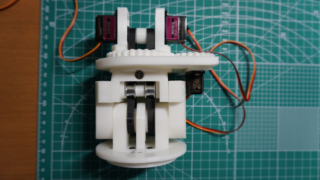
股関節をつくってみた。太腿はベルト駆動系で0°から115°、股関節は足先を90°歯車で旋回する。
タイミングベルトを使って、電池の電圧も確認して、結構満足のいく動きを見せた右膝ですが、そこから先、太もも、股関節と進むには、大きなハードルがいくつもありました。まず、アイデアが浮かんできません。少し時間がかかってしまいましたが、次のステップ...