 加工・組み立て
加工・組み立て ロボット制作 #22 ブラシレスモーターを動かしてみる
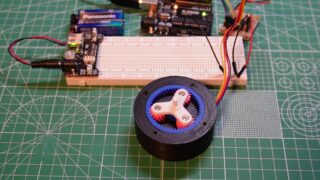
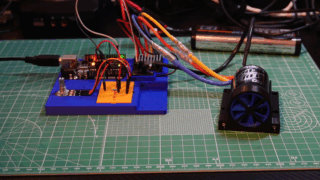
ブラシレスモーターをArduino UNO R3とESCを使って動かしてみた
今回は、ブラシレスモーターを動かしてみたいと思います。ブラシレスモーターは、ブラシと整流子を持たないため、長寿命、高効率、高精度な制御、静音性、メンテナンス性の高さなどが特徴です。ただし、ESC(Electric Speed Control...