制御
制御 ロボット制御 #16 Arduino UNO R4 Wifi と Raspberry Pi 5 をROS2で繋いでみる
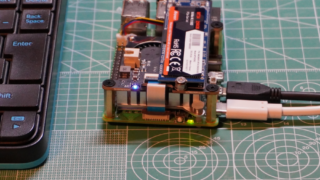
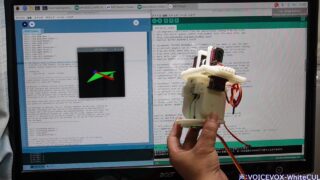
Raspberry Pi 5 と Arduino UNO R4 Wifi を ROS2 で繋いで MicroServo MG90S を動かしてみた話
今回は、「Arduino UNO R4 Wifi」と「Raspberry Pi 5」をROS2 Jazzy を使って繋いでみたいと思います。ArduinoでROS2を動かすためのライブラリは幾つかあるようですが、残念ながら公式ライブラリと思...