 制御
制御 ロボット制御⑦ 平衡感覚を手に入れる準備
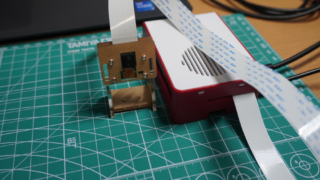
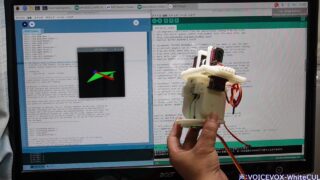
RaspberryPi4B で MPU-6050モジュール(GY-521ボード)を使ってTeapodデモを動かしてみた。
次は、二足歩行ロボットには、欠かせない姿勢推定(以降、人間的に「平衡感覚」と記載)。今回は、加速度・ジャイロセンサであるMPU6050から「I2CDev」に付属のライブラリを利用して、物体がどのような姿勢になっているかを把握する方法を実験し...